

【導(dǎo)讀】2015 年 4 月 15 日,MathWorks宣布推出Release 2015a 的組成部分 Robotics System Toolbox (機(jī)器人系統(tǒng)工具箱)。Robotics System Toolbox提供常用機(jī)器人算法,同時(shí)也提供了MATLAB和Simulink與機(jī)器人操作系統(tǒng) (ROS) 之間的接口與集成。
MathWorks 行業(yè)市場(chǎng)總監(jiān) Sameer Prabhu 說:“Robotics System Toolbox 將 MATLAB 和 Simulink 的算法開發(fā)和系統(tǒng)設(shè)計(jì)功能帶到機(jī)器人學(xué)科這一豐富多彩的領(lǐng)域。研究人員、工程師和學(xué)生們現(xiàn)在可在提供有 MATLAB 和 Simulink 以及支持 ROS 的機(jī)器人和仿真器的這個(gè)完全集成環(huán)境中,開發(fā)各種各樣的機(jī)器人應(yīng)用程序,可用于汽車、國(guó)防、航空航天、醫(yī)療和工業(yè)自動(dòng)化系統(tǒng)等領(lǐng)域。”
現(xiàn)在,機(jī)器人研究人員和工程師們可以在單個(gè)統(tǒng)一的設(shè)計(jì)環(huán)境中開發(fā)機(jī)器人算法,在支持ROS 的機(jī)器人和機(jī)器人仿真器(如 Gazebo 和 V-REP)上測(cè)試和部署機(jī)器人算法。它通過減少?gòu)?MATLAB程序轉(zhuǎn)換到 ROS程序所需的手動(dòng)修改時(shí)間,預(yù)留了更多的時(shí)間來測(cè)試和調(diào)試算法。
Robotics System Toolbox 中提供的核心算法包括適用于差動(dòng)驅(qū)動(dòng)機(jī)器人的地圖表示形式、路徑規(guī)劃和路徑跟蹤。工程師現(xiàn)在可以使用 MATLAB 或 Simulink 來設(shè)計(jì)電機(jī)控制、計(jì)算機(jī)視覺和狀態(tài)機(jī)應(yīng)用程序,并制作其原型,他們可以將其與 Robotics System Toolbox 中的核心算法集成。工程師也可以從 Simulink 模型中生成 ROS 節(jié)點(diǎn)(node)并通過自動(dòng)生成的 C++ 代碼將其部署到 ROS 網(wǎng)絡(luò)中。
機(jī)器人學(xué)科的學(xué)生和教師已經(jīng)使用 MATLAB 和 Simulink 來開發(fā)算法、可視化機(jī)器人行為并分析日志數(shù)據(jù)?,F(xiàn)在,他們可以使用 MATLAB 和 Simulink 為機(jī)器人或仿真器編程,同時(shí)繼續(xù)利用 MathWorks 硬件支持軟件包來與其他機(jī)器人硬件通信。
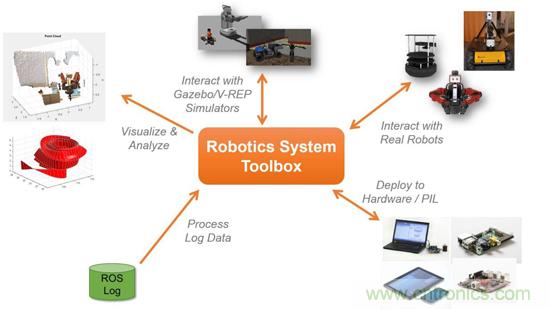
圖片中英文對(duì)照:
|
Source |
Target |
|
Robotics System Toolbox |
Robotics System Toolbox |
|
Interact with Gazebo/V-REP Simulators |
與 Gazebo/V-REP 仿真器互動(dòng) |
|
Interact with Real Robots |
與真正的機(jī)器人互動(dòng) |
|
Deploy to Hardware / PIL |
部署到硬件/PIL |
|
Process Log Data |
處理日志數(shù)據(jù) |
|
Visualize & Analyze |
可視化并分析 |


