
【導(dǎo)讀】當(dāng)小編與使用A/D轉(zhuǎn)換器的系統(tǒng)設(shè)計(jì)人員交流時(shí),他們最常問的就是:“你的16位A/D轉(zhuǎn)換器準(zhǔn)確度也是16位嗎?”要回答這個(gè)問題,關(guān)鍵在于從根本上理解分辨率和準(zhǔn)確度這兩個(gè)概念的區(qū)別。盡管這兩個(gè)術(shù)語(yǔ)截然不同,但卻經(jīng)常被混淆或互換使用。
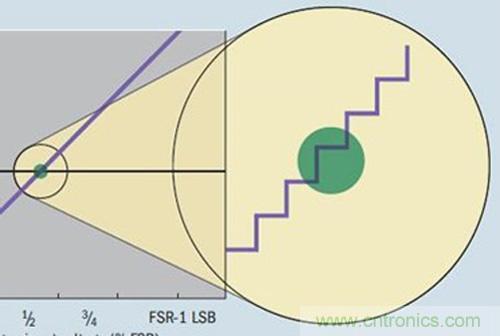
A/D轉(zhuǎn)換器的分辨率被定義為輸入信號(hào)值的最小變化,可通過一次計(jì)數(shù)改變數(shù)字輸出值。就理想的A/D轉(zhuǎn)換器而言,傳遞函數(shù)呈階梯狀,且每個(gè)步階寬度等于分辨率。但使用較高分辨率(16位或16位以上)的系統(tǒng)時(shí),傳遞函數(shù)的響應(yīng)和理想的響應(yīng)之間將存在較大的偏差。這是因?yàn)橛葾/D轉(zhuǎn)換器及驅(qū)動(dòng)器電路產(chǎn)生的噪聲可降低該轉(zhuǎn)換器的分辨率。
此外,如果一種直流(DC)電壓被施加到理想A/D轉(zhuǎn)換器的輸入端并進(jìn)行了多次轉(zhuǎn)換,那么數(shù)字輸出應(yīng)始終是同一個(gè)代碼。但在現(xiàn)實(shí)中,輸出代碼卻成了多個(gè)代碼,在多個(gè)位置上分布(見下圖的紅點(diǎn)群集),具體取決于系統(tǒng)總噪聲,其它因素還包括電壓參考和驅(qū)動(dòng)器電路。系統(tǒng)里噪聲越多,數(shù)據(jù)點(diǎn)的群集范圍會(huì)越大,反之亦然。圖1展示了一個(gè)半量程DC輸入的例子。在A/D轉(zhuǎn)換器的產(chǎn)品說明書中,A/D轉(zhuǎn)換器傳遞函數(shù)圖上的這種輸出點(diǎn)群集通常被表示為DC直方圖。
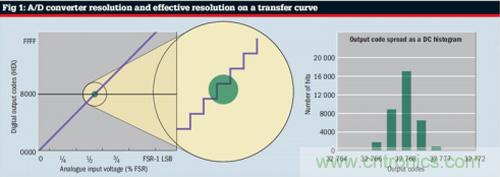
圖1的例證帶來了一個(gè)有趣的問題。如果同一種模擬輸入能產(chǎn)生多種數(shù)字輸出,那么A/D轉(zhuǎn)換器分辨率的定義是否依然適用?答案是肯定的 —— 但前提是我們要考慮到A/D轉(zhuǎn)換器的量化噪聲。然而,當(dāng)我們對(duì)信號(hào)鏈中的所有噪聲和失真進(jìn)行探究考量時(shí),卻發(fā)現(xiàn)A/D轉(zhuǎn)換器的無噪聲有效分辨率是由輸出代碼散布(Npp)狀況來決定的。
無噪聲分辨率 = log2(2n/Npp)
其中n是理想的分辨率
在典型的A/D轉(zhuǎn)換器產(chǎn)品說明書中,有效位數(shù)(ENOB)由交流(AC)參數(shù)和信噪失真比(SINAD)間接確定,可用下邊的方程式計(jì)算出ENOB:
ENOB =(SINAD-1.76)/6.02
接下來請(qǐng)仔細(xì)觀察:輸出代碼群集(圖1里的綠色群集)是否不僅未以理想的輸出代碼為中心、反而位于A/D轉(zhuǎn)換器傳遞曲線上的其它位置,遠(yuǎn)離紅點(diǎn)?這個(gè)距離是數(shù)據(jù)采集系統(tǒng)準(zhǔn)確度的指標(biāo)。A/D轉(zhuǎn)換器以及前端驅(qū)動(dòng)電路、參考和參考緩沖器都是整個(gè)系統(tǒng)準(zhǔn)確度的影響因素。
這里應(yīng)當(dāng)注意的是:A/D轉(zhuǎn)換器的準(zhǔn)確度和分辨率是兩個(gè)不同的參數(shù),它們可能彼此不相等。從系統(tǒng)設(shè)計(jì)的角度來看,準(zhǔn)確度可決定系統(tǒng)的整體誤差預(yù)算,而系統(tǒng)軟件算法完整性、控制和監(jiān)測(cè)能力則取決于分辨率。
已確定了A/D轉(zhuǎn)換器分辨率和準(zhǔn)確度之間的區(qū)別,我們現(xiàn)在可深入探討一下能對(duì)該轉(zhuǎn)換器的總準(zhǔn)確度產(chǎn)生影響的因素,通常被稱為未調(diào)整總誤差(TUE)。
您可曾想過在A/D轉(zhuǎn)換器的未調(diào)整總誤差(TUE)技術(shù)規(guī)格中“總”代表什么嗎?是僅僅把來自產(chǎn)品說明書的所有DC誤差技術(shù)規(guī)格,如偏移電壓、增益誤差和積分非線性 (INL) 誤差加起來那么簡(jiǎn)單還是有更深層的含義呢?事實(shí)上,TUE是系統(tǒng)總誤差相對(duì)于該轉(zhuǎn)換器工作輸入范圍的比率。
更具體地說,TUE是以最低有效位(LSB)為單位表示的DC誤差技術(shù)規(guī)格,代表A/D轉(zhuǎn)換器實(shí)際傳遞函數(shù)和理想傳遞函數(shù)之間存在的最大偏差。該技術(shù)規(guī)格假設(shè)未進(jìn)行系統(tǒng)級(jí)校準(zhǔn)。
從概念上講,TUE反映的是A/D轉(zhuǎn)換器運(yùn)行狀況中下列各類非理想因素的聯(lián)合效應(yīng):
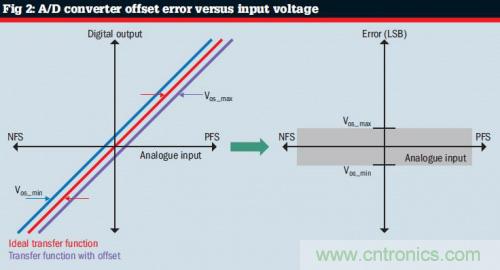
偏移誤差(VOS)。該誤差是A/D轉(zhuǎn)換器實(shí)際傳遞曲線和理想傳遞曲線之間的恒定差異(見圖2)。它是測(cè)定的數(shù)字輸出,通過把A/D轉(zhuǎn)換器輸入端短接到接地(GND)獲得。
增益誤差。A/D轉(zhuǎn)換器輸出的實(shí)際斜率和理想斜率之間的差異。它通常被表示為滿量程代碼處A/D轉(zhuǎn)換器范圍或最大誤差的比率。如圖2所示,隨著模擬輸入接近滿量程值,增益誤差的絕對(duì)值會(huì)增大。
積分非線性(INL)誤差。A/D轉(zhuǎn)換器實(shí)際傳遞曲線和理想直線運(yùn)行方式之間存在的最大非線性偏差。A/D轉(zhuǎn)換器的INL響應(yīng)圖沒有固定的形狀,具體取決于內(nèi)部電路架構(gòu)以及由前端信號(hào)調(diào)節(jié)電路造成的失真。
大多數(shù)A/D轉(zhuǎn)換器產(chǎn)品說明書為所有上述DC誤差明確規(guī)定了典型值和最大值,但未給TUE指定這方面的數(shù)值。計(jì)算TUE的最大值可不像求所有單個(gè)DC誤差最大值的總和那么簡(jiǎn)單。原因是:所有這些誤差是不相關(guān)的,而且最糟糕的情況是,在A/D轉(zhuǎn)換器的傳遞函數(shù)上,偏移、增益和線性誤差可能并非都出現(xiàn)于相同的輸入電壓下。所以,將誤差簡(jiǎn)單相加也許會(huì)使系統(tǒng)準(zhǔn)確度看起來過差。如果應(yīng)用的動(dòng)態(tài)范圍被限制在接近傳遞函數(shù)中間的位置,情況更是如此。
在典型的數(shù)據(jù)采集系統(tǒng)中,與A/D轉(zhuǎn)換器配套的有一個(gè)輸入驅(qū)動(dòng)器,還有一個(gè)電壓參考,兩者均可使總的偏移和增益誤差增加。因此,在大多數(shù)無校準(zhǔn)功能的系統(tǒng)里計(jì)算TUE最大值時(shí),偏移和增益誤差會(huì)比INL誤差大。要計(jì)算特定模擬輸入電壓下的最大TUE,推薦的方法是取那一點(diǎn)上所有單個(gè)誤差最大值的和方根。重要的是把所有這些誤差轉(zhuǎn)換成相同的單位(通常是LSB)。
TUE = v[|VOS|2 + gain2 + INL2]
借助該方程式通常可生成一個(gè)“蝴蝶結(jié)”形狀的誤差圖。對(duì)于具有較高偏移誤差的系統(tǒng),“蝴蝶結(jié)”的結(jié)較厚。但對(duì)于具有較高增益誤差的系統(tǒng),“蝴蝶結(jié)”的結(jié)則變得較薄,弓形變得較厚。
總之,沒有能為A/D轉(zhuǎn)換器計(jì)算TUE最大值的確定公式,因?yàn)樵撜`差取決于A/D轉(zhuǎn)換器工作時(shí)的輸入范圍。如果系統(tǒng)不需要采用A/D轉(zhuǎn)換器的整個(gè)輸入范圍,那么工程師可通過使該器件遠(yuǎn)離其傳遞函數(shù)的端點(diǎn)運(yùn)行來最大限度地減小TUE。





