

【導讀】汽車航位推算(DR)導航系統(tǒng)采用一個陀螺儀(gyro)來推算車輛的即時航向。借助該信息再加上行駛的距離,導航系統(tǒng)可以正確確定車輛的位置,即使衛(wèi)星信號因擁擠的城區(qū)環(huán)境或隧道而受阻時亦是如此。在DR導航中使用陀螺儀的一個重大挑戰(zhàn)是,衛(wèi)星信號可能會丟失較長時間,結果使累積角度誤差過大而無法精確定位車輛。本文為這個問題提出了一種簡單的解決辦法。
DR導航的工作原理
圖1所示為DR導航的基本工作原理。一個陀螺儀測量車輛的旋轉速率,單位為度/秒。代表車輛即時航向的角度通過計算旋轉速率的時間積分而求得。結合航向和行駛距離,可以確定車輛的位置,如圖中的紅線所示。
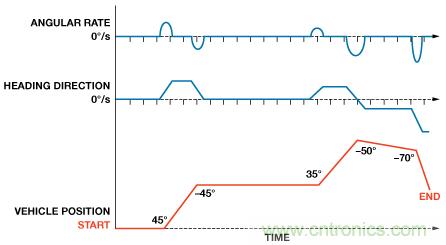
圖1. DR導航的工作原理
使用數(shù)字陀螺儀時,積分速率可以表示為速率樣本和與采樣間隔之積:
其中,ri 為陀螺儀檢測到的速率,n 為樣本數(shù), τ 為采樣間隔。
隨時間累積的角度誤差可以表示為:
其中, ei 為各樣本的速率誤差,n為樣本數(shù),τ 為采樣間隔。
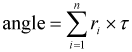
根據該公式,隨著所需積分時間變長,累積誤差變大,如圖2所示。這些速率樣本(用帶ADXRS810高性能角速率傳感器的評估板測得)模擬的是共含有3300個速率樣本的DR導航系統(tǒng)。藍線表示陀螺儀速率樣本;紅線表示累積角度誤差。顯然,累積角度誤差隨時間而變大。
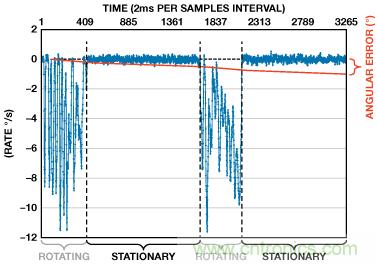
圖2. 使用ADXRS810評估板測得的速率。(注:角度誤差未按比例繪制。)
用低通濾波器(LPF)縮短積分時間
降低角度誤差的傳統(tǒng)方法將重點放在減小en上,但當今的數(shù)字陀螺儀的速率誤差規(guī)格已處于非常低的水平。例如,ADXRS810的靈敏度為80 LSB/°/秒,失調為±2°/秒,抗沖擊性為0.03°/秒/g ,改善空間有限。另外,en 的補償算法非常復雜。與諸如電子穩(wěn)定控制(ESC)等其他應用相比,DR導航系統(tǒng)中的陀螺儀可以長期運行,例如車輛行駛通過長隧道時GPS信號就不會丟失。在DR導航應用中,較長的運行時間會導致角度誤差變大。
如果可以縮短積分時間,則可以顯著降低累積角度誤差。當陀螺儀不旋轉時,速率輸出較小,但因陀螺儀噪聲的影響,輸出不是零。ADXRS810具有超低的陀螺儀噪聲和超高的靈敏度,只需設置相應的閾值,即可輕松過濾掉數(shù)字域中的噪聲。這一過程等效于低通濾波,因為與旋轉導致的速率輸出相比,陀螺儀速率噪聲處于高頻區(qū)。
圖3所示為圖2的LPF版本,其中,小于1°/s的所有速率樣本均歸零處理,因此在速率積分時忽略不計。剩下的積分時間,被認為是有效積分時間,只相當于總積分時間的16%左右。如此可以大幅縮短積分時間。結果,累積角度誤差也顯著降低,如圖中的紅線所示。
圖3. 使用ADXRS810評估板和數(shù)字LPF測得的速率。 (注:角度誤差未按比例繪制。)
在實際應用中,車輛方向盤一般位于零度處。因此,可以通過忽略來減少陀螺儀速率的有效積分時間,如圖3所示實驗中所做的那樣。圖4所示為來自真實車載測試的陀螺儀速率樣本。在隧道中行駛大約180秒,則需要180秒的速率積分時間。如果不使用LPF過程,則180秒內累積的誤差可能高達4°,該值太大,導致無法正確確定車輛在隧道中的位置。采用LPF過程,將閾值設為0.5°/秒,則有效積分時間縮短至84秒,減幅達53%左右。累積誤差降至約0.5°,如圖5所示。設置LPF閾值時,可以根據具體應用所需要的精度來定。
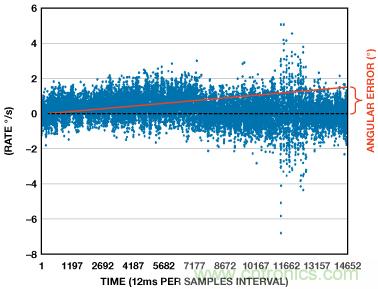
圖4. 未經過濾的車載陀螺儀速率樣本。(注:角度誤差未按比例繪制。)
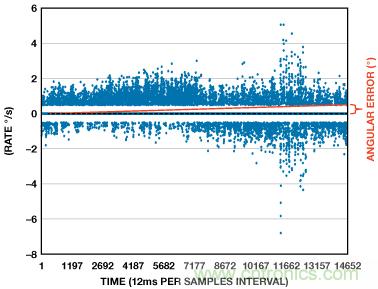
圖5. 使用LPF后的車載陀螺儀速率樣本。(注:角度誤差未按比例繪制。)
結論
如今的數(shù)字陀螺儀具有出色的規(guī)格特性,因此,其性能的提升余地有限。在車載DR導航系統(tǒng)以及要求長積分時間的其他應用中,通過設置LPF閾值來縮短積分時間是一種簡單但有效的精度提升方法。
ADXRS810高性能、低成本數(shù)字陀螺儀采用ADI公司的新型MEMS技術,是車載DR導航應用的上佳選擇。該陀螺儀采用超小型封裝,具有低失調、低噪聲和高速率靈敏度的特點。采用芯片集成溫度補償技術,無需使用外部溫度傳感器,同時簡化了溫度補償算法。其超高的抗沖擊和抗振動能力對汽車應用具有十分重要的意義。
推薦閱讀:



