
【導讀】隨著科學技術的不斷發(fā)展,在測距領域也先后出現(xiàn)了激光測距、微波雷達測距、超聲波測距及紅外線測距等方式。作為一種應用廣泛、測量精度高的測量方式,紅外測距利用紅外線傳播時不擴散、折射率小的特性,根據(jù)紅外線從發(fā)射模塊發(fā)出到被物體反射回來被接受模塊接受所需要的時間,采用相應的測距公式來實現(xiàn)對物體距離的測量。
紅外測距最早出現(xiàn)于上世紀60年代,是一種以紅外線作為傳輸介質(zhì)的測量方法。紅外測距的研究有著非比尋常的意義,其本身具有其他測距方式?jīng)]有的特點,技術難度相對不大,系統(tǒng)構成成本較低、性能良好、使用方便、簡單,對各行各業(yè)均有著不可或缺的貢獻,因而其市場需求量更大,發(fā)展空間更廣。紅外測距儀是指用調(diào)制的紅外光進行精密的距離測量,測量范圍一般為1-5公里。

紅外線測距傳感器有它的幾個特點,遠距離測量,在無反光板和反射率低的情況下能測量較遠的距離;有同步輸入端,可多個傳感器同步測量;測量范圍廣,響應時間短;外形設計緊湊,易于安裝,便于操作;所以它的應用價值比較高。
紅外測距的常用方法和原理
時間差法測距原理
時間差法測距原理是將紅外測距傳感器的紅外發(fā)射端發(fā)送信號與接收端接受信號的時間差t寫入單片機中,通過光傳播距離公式來計算出傳播距離L。
式中c是光的傳播速度為。
反射能量法測距原理
反射能量法是由發(fā)射控制電路控制發(fā)光元件發(fā)出信號(通常為紅外線)射向目標物體,經(jīng)物體反射后傳回系統(tǒng)的接收端,通過光電轉換器接收的光能量大小進而計算出目標物體的距離L。
式中P為接收端接收到的能量,K為常數(shù),其大小由發(fā)射系統(tǒng)輸出功率、轉換效率決定,d為被測目標漫反射率。
相位法測距原理
相位測距法是利用無線電波段的頻率,對紅外激光束進行幅度調(diào)制并測定調(diào)制光往返一次所產(chǎn)生的相位延遲 ,再根據(jù)調(diào)制光的波長,換算出此相位延遲所代表的距離D,此方式測量精度非常之高,相對誤差可以保持在百分之一以內(nèi),但要求被測目標必須能主動發(fā)出無線電波產(chǎn)生相應的相位值。
式中c是光的傳播速度為,是調(diào)制信號的角頻率。
三角法測距原理
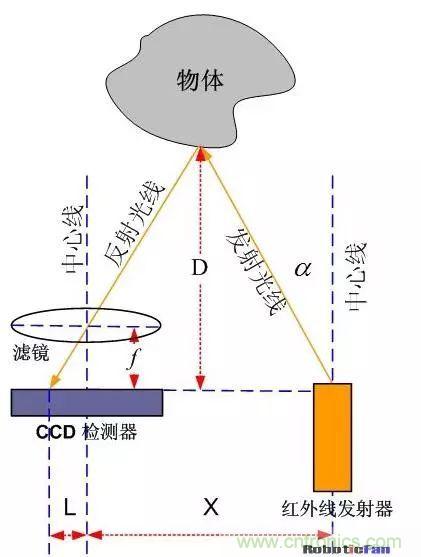
三角測量原理。紅外發(fā)射器按照一定的角度發(fā)射紅外光束,當遇到物體以后,光束會反射回來,如圖1所示。反射回來的紅外光線被CCD檢測器檢測到以后,會獲得一個偏移值L,利用三角關系,在知道了發(fā)射角度a,偏移距L,中心矩X,以及濾鏡的焦距f以后,傳感器到物體的距離D就可以通過幾何關系計算出來了。
紅外測距系統(tǒng)的工作原理
反射能量法因其結構簡單、體積小、成本低,可以廣泛應用于大批量生產(chǎn)的光機電綜合產(chǎn)品,本文后面重點介紹基于此類方法的對紅外測距系統(tǒng)。
反射能量法基本原理是紅外發(fā)射電路的紅外發(fā)光二極管發(fā)出紅外光,經(jīng)障礙物反射后,由紅外接收電路的光敏接收管接收前方物體反射光,據(jù)此判斷前方是否有障礙物。根據(jù)發(fā)射光的強弱可以判斷物體的距離,由于接收管接收的光強隨是隨反射物體的距離變化而變化的,因而,距離近則反射光強,距離遠則反射光弱。
因為紅外線是介于可見光和微波之間的一種電磁波,因此,它不僅具有可見光直線傳播、反射、折射等特性,還具有微波的某些特性,如較強的穿透能力和能貫穿某些不透明物質(zhì)等。紅外傳感器包括紅外發(fā)射器件和紅外接收器件。自然界的所有物體只要溫度高于絕對零度都會輻射紅外線,因而,紅外傳感器須具有更強的發(fā)射和接收能力。
紅外測距的基本結構及系統(tǒng)
紅外測距的過程
紅外測距的工作過程簡單來講就是瞄準目標,然后接通電源,啟動發(fā)射電路,通過發(fā)射系統(tǒng),像目標發(fā)射紅外信號,同時,采樣器采樣發(fā)射信號,作為計數(shù)器開門的脈沖信號,啟動計數(shù)器,時鐘振蕩器像計數(shù)器有效的輸入計數(shù)脈沖,由目標反射回來的紅外線回波作用在光電探測器上,轉變?yōu)殡娒}沖信號,經(jīng)過放大器放大,進入計數(shù)器,作為計數(shù)器的關門信號,計數(shù)器停止計數(shù),計數(shù)器從開門到關門期間,所進入的時鐘脈沖個數(shù),經(jīng)過運算得到目標距離,測距公式為:

式中:L——待測距離;
c——光速;
t——光脈沖在待測距離上往返傳輸所需要的時間。
只要求出光脈沖在待測距離往返傳輸所需要的時間就可以通過上式求出目標距離。紅外脈沖的原理與結構比較簡單、測距遠、功耗小。
紅外測距系統(tǒng)框圖
本系統(tǒng)主要由五部分組成:紅外發(fā)射電路、紅外接收電路、放大電路、單片機電路、譯碼顯示電路。其工作過程如圖:
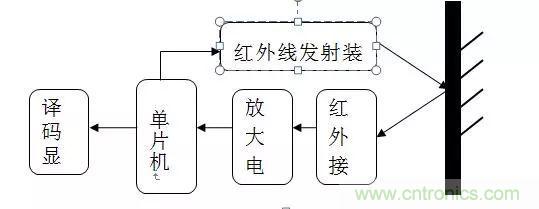
系統(tǒng)工作時,由發(fā)射單元發(fā)出一束激光,到達待測目標物后漫反射回來,經(jīng)接收單元接收、放大整形后到距離計算單元計算完畢后顯示目標物距離。
紅外測距系統(tǒng)主要元件
紅外線發(fā)射器件
紅外線發(fā)射器件是最長用的為紅外發(fā)光二極管,它與普通發(fā)光二極管的結構原理以及制作工藝基本相同,是只有一個PN結的半導體器件,只是所有的材料不同,制造紅外發(fā)光二極管砷化鉀,砷鋁鉀等,其中應用最多的是砷化鉀。
紅外發(fā)光二極管一般采用環(huán)氧樹脂,玻璃,塑料等封裝,除白色透明材料封裝外,還可見到用藍色透明材料封裝的,。紅外發(fā)光二極管按發(fā)光功率的大小,可分為小功率,中功率,大功率三種。另外,紅外發(fā)光二極管除頂面發(fā)光型外,還有側面發(fā)光型。小功率管一般采用全塑封裝,也有部分是采用陶瓷底座,頂端用玻璃或環(huán)氧樹脂透鏡封裝的,中大功率管一般采用帶螺紋金屬底座,以便安裝散熱片。隨著發(fā)光功率得提高,相應體積的管子也增大。
紅外發(fā)光二極管的主要參數(shù)
正向工作電流
指紅外發(fā)光二極管長期工作時,允許通過的最大平均電流,因為電流通過PN結時,要消耗一定的功率而引起管子發(fā)熱,如管子長期超過I運行,會因過熱而燒毀,因此,使用的最大平均正向工作電流不得超過I。
光功率
指輸入到發(fā)光二極管的電功率轉化為光輸出功率的那一部分。光功率越大,發(fā)射距離越遠。
指紅外發(fā)光二極管所發(fā)出近紅外光中,光強最大值所對應的發(fā)光波長,在選用紅外接收管時,其受光峰值波長應盡量靠近。
指管子未被反向擊穿時反向電流的大小,希望它越小越好。
由于紅外發(fā)光二極管PN結電容的存在,影響了它的工作頻率?,F(xiàn)在,紅外發(fā)光二極管的相應時間一般為最高工作頻率為幾十兆赫。
紅外線光敏二極管
我們知道半導體具有光電效應,即用光照半導體,可使半導體的電阻率發(fā)生變化。利用半導體的光電效應可以制成光電二極管,不同的半導體材料對不同波長的入射光的響應是不同的。
光敏二極管有頂面受光和側面受光兩種形式。它也是采用塑料、玻璃、環(huán)氧樹脂等材料封裝。
光敏二極管的主要參數(shù)
光電流IL
指在一定反向電壓下,入射光強為某一定值時流過管子的電流。光敏二極管的光電流一般為幾十μA,并與入射光強成正比。
暗電流ID
指在一定反向電壓下,無光照時流過管子的電流。一般在50V反壓下,ID小于0.1μA。
反向工作電壓UR
是指在無光照時,光敏二極管反向電流小于0.2μA-0.3μA時,允許的最高反向工作電壓,一般在10V左右,最高可達幾十伏。
紅外測距硬件電路
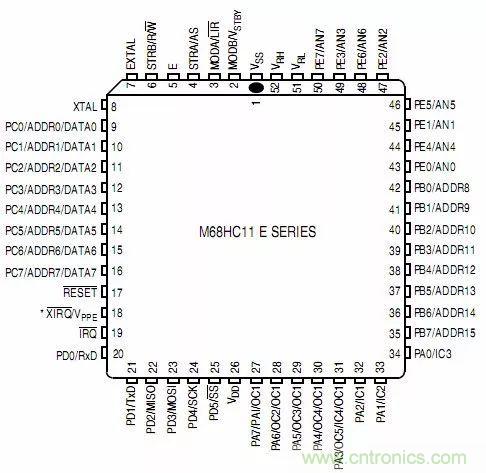
單片機最小系統(tǒng)
單片機由CPU、片內(nèi)存儲器、定時器系統(tǒng)、串行口、A/D、并行I/O口,中斷和復位系統(tǒng)組成。如圖:
控制板ASBUS總線
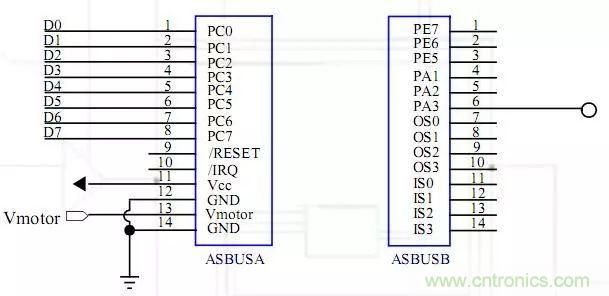
簡單類似于ISA和PCI總線。采用堆疊式的ASBUS擴展卡可以方便擴展控制板的功能??偩€通常包含了幾十條分立的線,每一條被賦予一個特定的含義或功能。
總線可以分成三個功能組:
數(shù)據(jù)線:數(shù)據(jù)線提供系統(tǒng)模塊間傳送數(shù)據(jù)的路徑。這些線結合在一起稱為數(shù)據(jù)總線。線的數(shù)目稱為數(shù)據(jù)總線的寬度。
地址線:地址線用于指定數(shù)據(jù)線上數(shù)據(jù)的來源和去向。地址線的寬度決定了系統(tǒng)能夠使用的最大的存儲器容量。
控制線:控制線用來控制對數(shù)據(jù)地址線的訪問和使用。由于數(shù)據(jù)線和地址,所有模塊共享,因此必須用一種方法來控制他們的使用。
紅外發(fā)射電路
電路組成:紅外發(fā)射驅動電路是由一個簡單的共射放大電路和一個作為開關的三極管電路組成的模塊。電路原理如圖:
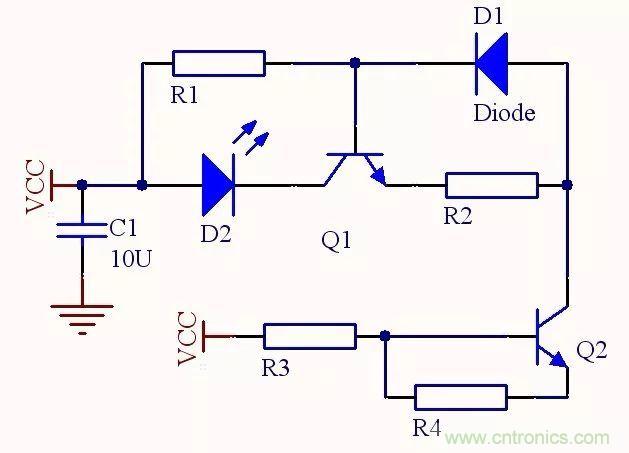
電路工作原理:在共射放大電路中,紅外發(fā)光二極管TLN205接于共射放大電路的集電極,與基極和發(fā)射極相接的二極管起溫度補償作用??刂乒苣_Vin與68HC11E1芯片管腳Vcc相接。當控制管腳Vin有信號輸入時,控制電路的三極管導通,同時整個電路導通,紅外發(fā)光二極管TLN205發(fā)射出紅外光。
紅外接收放大電路
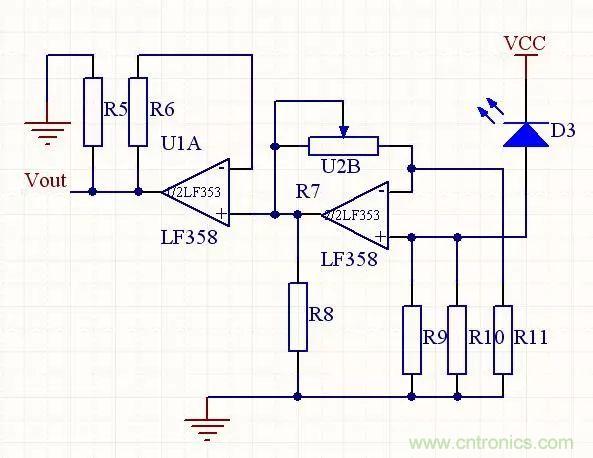
電路組成:紅外接收驅動電路是由紅外接收管TPS708和兩個電壓串聯(lián)負反饋模擬運算放大電路組成的模塊. 紅外接收驅動電路設計為兩極放大是因為在許多情況下,輸入信號是很微弱的,要把這樣微弱的信號放大到足以帶動負載,僅用一級電路放大定是做不到的,必須經(jīng)多級放大,以滿足放大倍數(shù)和其他性能方面的要求。
電路工作原理:紅外發(fā)光管TLN205發(fā)射出的紅外光,在遇到前面的障礙物反射后,由紅外接收管TPS708接收,此時TPS708會產(chǎn)生一個與光強相對應的電流。電流經(jīng)由LM358 兩級放大后,在輸出端可以得到一個0~3V的模擬電壓,作68HC11E1 單片機模擬輸入量進行A/D轉換,最后將轉換結果在LED上顯示出來。
運算放大電路定量分析:我們采用負反饋模擬運算放大電路,是因為負反饋具有提高增益穩(wěn)定性、展寬放大器通頻帶與減少非線性失真和噪音三大優(yōu)點,并且負反饋還有對相應的輸出量進行自動調(diào)節(jié)作用。
電源電路
電路組成:該穩(wěn)壓電源由變壓電路、整流電路、濾波電路、和穩(wěn)壓電路四大部分組成。如圖所示:
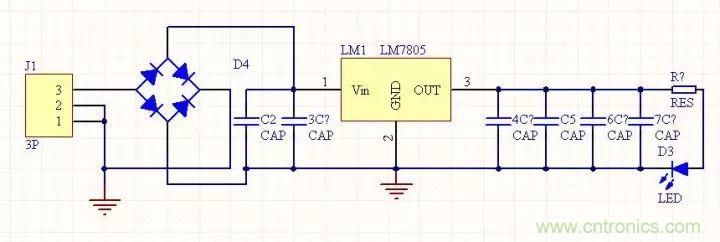
電路工作原理:該電路為交直轉換電源電路,首先,由變壓器將市電220V交流電變成9V的交流電,再經(jīng)單相橋式整流電路將交流電變?yōu)樗枰闹绷麟?,后再?jīng)濾波電路、7805穩(wěn)壓器把不穩(wěn)定的直流電壓變?yōu)榉€(wěn)定的直流5V電壓輸出,供整個紅外測距模塊使用。
濾波電路
整流輸出的電壓是一個單方向脈動電壓,雖然是直流,但脈動較大,為了得到平滑的直流電壓波形,必須采用濾波電路,以改善輸出電壓的脈動性,常用的濾波電路有電容濾波、電感濾波、復式濾波等,此處采用電容濾波。
單相半波整流電容濾波電路如圖所示,由于電容兩端電壓不能突變,因而負載兩端的電壓也不會突變,使輸出電壓得以平滑,達到濾波目的。
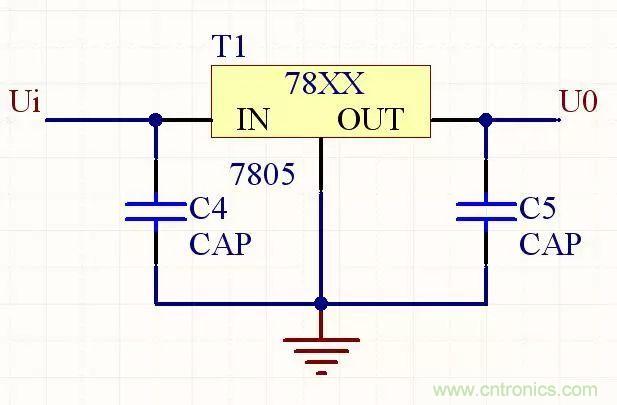
通過整流濾波電路所獲得的直流電源電壓是比較穩(wěn)定的,當電網(wǎng)電壓波動或負載電流變化時,輸出電壓會隨之改變。電子設備一般都需要穩(wěn)定的電源電壓。如果電源電壓不穩(wěn)定會引起直流放大器的零點漂移、交流燥聲增大、測量儀表的測量精度降低等。因此,必須進行穩(wěn)壓,目前,中小功率設備中廣泛采用的穩(wěn)壓電源有并聯(lián)型穩(wěn)壓電源、串聯(lián)型穩(wěn)壓電源、集成穩(wěn)壓電路及開關型穩(wěn)壓電路。
數(shù)碼管顯示電路
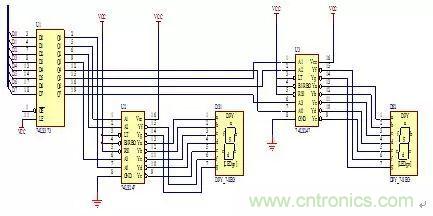
電路組成:LED動態(tài)顯示電路如圖9所示,ASBUSA的數(shù)據(jù)輸出口PC0~PC7與74LS373的數(shù)據(jù)輸入口D0~D7連接,74LS373輸出的高四位Q4~Q7經(jīng) 74LS247譯碼與DS2相連,低四位Q0~Q3經(jīng)74LS247譯碼與DS1相連,兩個LED可顯示10~80的距離值。
電路工作原理: ASBUSA的數(shù)據(jù)輸出口PC0~PC7輸出距離的BCD碼,經(jīng)74LS373鎖存后,高四位Q4~Q7經(jīng)74LS247譯碼為相應的斷碼由七段碼顯示管顯示十位數(shù),低四位Q0~Q3經(jīng)74LS247譯碼為相應的斷碼由七段碼顯示管顯示個位數(shù),因此距離可由兩個LED顯示管顯示出來。
軟件模塊框圖
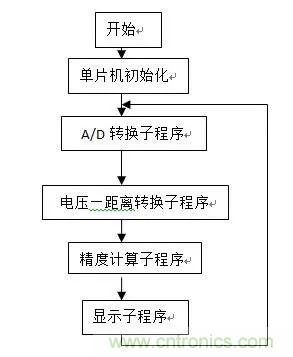
當單片機接收到紅外接收電路傳輸?shù)碾妷盒盘柡螅?jīng)A/D轉換程序,將片外的模擬信號轉換為單片機可識別的數(shù)字信號,并經(jīng)電壓—距離轉換子程序,將變化的電壓轉換為距離。最后,在LED顯示器上顯示出來。
本文轉載自傳感器技術。
本文轉載自傳感器技術。
推薦閱讀:



