

【導(dǎo)讀】當(dāng)今采用的有線和無線通信方法支持在整個(gè)工廠或公司范圍內(nèi)實(shí)施監(jiān)控。機(jī)器必須具備本地智能傳感器和通信基礎(chǔ)架構(gòu),這是獲得額外的分析能力的前提。這些傳感器是什么樣的、需要滿足哪些要求、有哪些關(guān)鍵特性?本文會(huì)就這些問題以及其他問題展開探討。
改善狀態(tài)監(jiān)控和診斷并實(shí)現(xiàn)整體系統(tǒng)優(yōu)化,是當(dāng)今人們?cè)谑褂脵C(jī)械設(shè)施和技術(shù)系統(tǒng)時(shí)面臨的部分核心挑戰(zhàn)。這個(gè)話題不僅在工業(yè)領(lǐng)域,在任何使用機(jī)械系統(tǒng)的地方都愈加重要。以往,都是根據(jù)計(jì)劃來維護(hù)機(jī)器,延遲維護(hù)可能會(huì)面臨生產(chǎn)停工的風(fēng)險(xiǎn)。如今,人們通過處理機(jī)器的數(shù)據(jù)來預(yù)測(cè)其剩余的使用壽命。尤其是溫度、噪聲和振動(dòng)等關(guān)鍵參數(shù),可以利用記錄的這些數(shù)據(jù)來確定最佳運(yùn)行狀態(tài),甚至是所需的維護(hù)次數(shù)。此舉可以避免造成不必要的磨損,并且能夠盡早發(fā)現(xiàn)潛在的問題和原因。通過這種狀態(tài)監(jiān)控,設(shè)施的可用性和有效性可挖掘出相當(dāng)大的優(yōu)化空間,從而獲得決定性的優(yōu)勢(shì)。例如,經(jīng)證實(shí),實(shí)施這種監(jiān)控之后,ABB1一年內(nèi)將停機(jī)時(shí)間減少了70%,將電機(jī)的服務(wù)壽命延長(zhǎng)了30%,同時(shí)將設(shè)施的能耗降低了10%。
預(yù)防性維護(hù)的一個(gè)重要組成部分就是基于狀態(tài)的監(jiān)控(CBM),通常監(jiān)控渦輪機(jī)、風(fēng)扇、泵、電機(jī)等旋轉(zhuǎn)機(jī)器。利用CBM可實(shí)時(shí)記錄運(yùn)行狀態(tài)信息。但是,不會(huì)提供故障或磨損預(yù)測(cè)。這些只能通過預(yù)防性維護(hù)提供,因此帶來一個(gè)轉(zhuǎn)折點(diǎn):借助更加智能的傳感器、更強(qiáng)大的通信網(wǎng)絡(luò)和計(jì)算平臺(tái),人們能夠創(chuàng)建模型、檢測(cè)變更,并詳細(xì)計(jì)算服務(wù)壽命。
為了構(gòu)建有效的模型,需要分析振動(dòng)、溫度、電流和磁場(chǎng)。當(dāng)今采用的有線和無線通信方法支持在整個(gè)工廠或公司范圍內(nèi)實(shí)施設(shè)施監(jiān)控?;谠频南到y(tǒng)為我們帶來了更多的分析可能性,使得操作員和維修技術(shù)人員能夠通過簡(jiǎn)單的方式獲得有關(guān)機(jī)器狀態(tài)信息的數(shù)據(jù)。但是,機(jī)器必須具備本地智能傳感器和通信基礎(chǔ)架構(gòu),這是獲得額外的分析能力的前提。這些傳感器是什么樣的、需要滿足哪些要求、有哪些關(guān)鍵特性—本文會(huì)就這些問題以及其他問題展開探討。
機(jī)器的生命周期展示
關(guān)于狀態(tài)監(jiān)控,可能需要考慮以下最基本的問題:在實(shí)施必要的維護(hù)之前,設(shè)備能夠運(yùn)行多長(zhǎng)時(shí)間?
一般而言,從邏輯上來說,從發(fā)現(xiàn)問題到開始維護(hù)的間隔時(shí)間越短越好。但是,為了優(yōu)化運(yùn)營和維護(hù)成本,或者完全發(fā)揮設(shè)施的最高效率,需要熟悉機(jī)器特性的專業(yè)人員憑借知識(shí)經(jīng)驗(yàn)來判斷。這些專業(yè)人員主要來自軸承/潤滑領(lǐng)域,在電機(jī)分析方面經(jīng)驗(yàn)不多,屬于最薄弱的環(huán)節(jié)。專業(yè)人員最終會(huì)決定,根據(jù)實(shí)際的生命周期(如圖1)和實(shí)際狀態(tài)偏離正常狀態(tài)的情況,是否應(yīng)當(dāng)進(jìn)行維修甚至是更換。
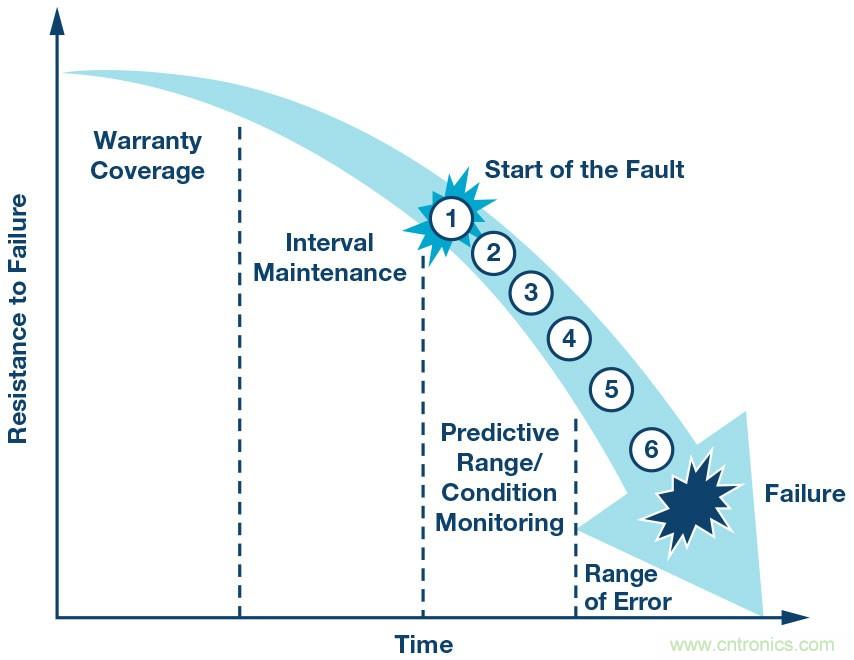
圖1:機(jī)器的生命周期。
尚未使用的機(jī)器最初處于所謂的保修期。這屬于生命周期的早期階段,不排除這個(gè)階段會(huì)出現(xiàn)故障,但這種幾率相對(duì)非常小,且一般與生產(chǎn)故障有關(guān)。只有在接下來的定期維護(hù)階段,接受過相應(yīng)培訓(xùn)的維修人員才會(huì)開始進(jìn)行針對(duì)性的干預(yù)。無論機(jī)器的實(shí)際狀態(tài)如何,他們都會(huì)按照指定的時(shí)間,或者在達(dá)到指定的使用時(shí)間后,對(duì)機(jī)器執(zhí)行例行維護(hù),例如,為機(jī)器換油。這種情況下,維護(hù)間隔期間出現(xiàn)故障的幾率也仍然非常低。隨著機(jī)器的使用時(shí)間增加,會(huì)逐漸到達(dá)狀態(tài)監(jiān)控階段。自此之后,應(yīng)做好故障應(yīng)對(duì)準(zhǔn)備。圖1顯示了以下6種變化,從超聲波范圍(1)的變化開始,接著是振動(dòng)變化(2)。通過分析潤滑油(3)或者通過稍微提高溫度(4),在實(shí)際發(fā)生故障之前,可以通過可感知的噪聲(5)或發(fā)熱情況(6)檢測(cè)出將要發(fā)生故障的前期跡象。振動(dòng)通常用于確認(rèn)老化情況。圖2顯示了三臺(tái)相同設(shè)備在生命周期內(nèi)的振動(dòng)模式。三臺(tái)機(jī)器在初始階段都處于正常范圍。但是,從中期階段開始,根據(jù)具體的載荷情況,振動(dòng)或多或少快速增加;到后期階段會(huì)呈指數(shù)增加達(dá)到臨界范圍。一旦設(shè)備達(dá)到臨界范圍,則需要立即采取行動(dòng)。
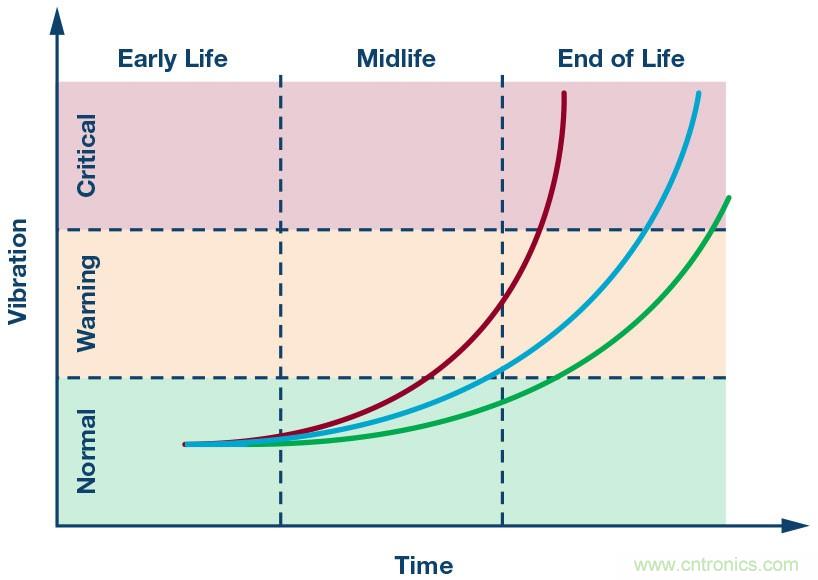
圖2:振動(dòng)參數(shù)隨時(shí)間發(fā)生變化。
通過振動(dòng)分析實(shí)施狀態(tài)監(jiān)控
輸出速度、齒輪比和軸承組件數(shù)量等參數(shù)與機(jī)器的振動(dòng)模式分析密切相關(guān)。一般來說,齒輪箱導(dǎo)致的振動(dòng)在頻域體現(xiàn)為軸速的倍數(shù),而軸承的特征頻率通常不代表諧波分量。此外,通常還會(huì)檢測(cè)湍流和氣蝕導(dǎo)致的振動(dòng)。它們通常與風(fēng)扇和泵中的氣流和/或液流有關(guān),因此,一般被視為隨機(jī)振動(dòng)。它們通常呈靜止?fàn)顟B(tài),從統(tǒng)計(jì)特性來看,并不存在差異。但是,隨機(jī)振動(dòng)也具有循環(huán)平穩(wěn)性,因此也具有統(tǒng)計(jì)特性。它們由機(jī)器產(chǎn)生并發(fā)生周期性變化,這與內(nèi)燃機(jī)每個(gè)氣缸每個(gè)周期點(diǎn)火一次的情形類似。
傳感器方向也至關(guān)重要。如果采用單軸傳感器來測(cè)量主要線性振動(dòng),則必須按照振動(dòng)方向來調(diào)整傳感器。也可使用多軸傳感器記錄所有方向的振動(dòng),但是基于其物理特性,采用單軸傳感器的噪聲更低、測(cè)量范圍更廣,帶寬也更大。
對(duì)振動(dòng)傳感器的需求
為了廣泛使用振動(dòng)傳感器來實(shí)施狀態(tài)監(jiān)控,務(wù)必考慮兩個(gè)重要因素:低成本和小尺寸。以往人們通常使用壓電傳感器,如今則越來越多地使用基于MEMS的加速計(jì)。它們具有更高的分辨率、出色的漂移特性和靈敏度,以及更高的信噪比,此外,還能檢測(cè)幾乎接近直流范圍的極低頻率振動(dòng)。同時(shí)也非常節(jié)能,因此非常適合電池供電的無線監(jiān)控系統(tǒng)。與壓電傳感器相比還有另一項(xiàng)優(yōu)勢(shì):可以將整個(gè)系統(tǒng)集成到單個(gè)殼體(系統(tǒng)級(jí)封裝)中。這些所謂的SiP解決方案不斷集成以下其他重要功能,共同構(gòu)建為智能系統(tǒng):模數(shù)轉(zhuǎn)換器、帶嵌入式固件(實(shí)施專用預(yù)處理)的微控制器、通信協(xié)議和通用接口,此外還包括各種保護(hù)功能。
集成保護(hù)功能非常重要,這是因?yàn)閭鞲衅髟芰^大會(huì)導(dǎo)致?lián)p壞。集成的超量程檢測(cè)功能會(huì)發(fā)出警告,或者通過關(guān)閉內(nèi)部時(shí)鐘,停用陀螺儀中的傳感器組件,從而保護(hù)傳感器元件不受損害。SiP解決方案見圖3。
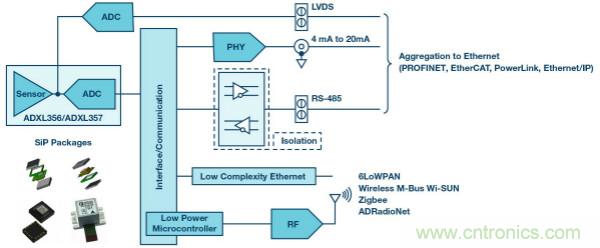
圖3:基于MEMS的系統(tǒng)級(jí)封裝(左側(cè))。
隨著CBM領(lǐng)域的需求增加,對(duì)傳感器的需求也相應(yīng)增加。對(duì)于有效的CBM,對(duì)傳感器測(cè)量范圍(滿量程,即FSR)的要求一般為±50g。
由于加速度與頻率的平方成比例,所以能夠相對(duì)很快地達(dá)到這些高加速力。公式1可以證明這一點(diǎn):
變量表示加速度,f表示頻率,d表示振動(dòng)幅度。因此,例如,振動(dòng)為1kHz時(shí),1µm的振幅會(huì)產(chǎn)生39.5g的加速度。
至于噪聲性能,這個(gè)值在盡可能廣泛的頻率范圍內(nèi)(從接近dc到數(shù)十kHz的中間范圍)都應(yīng)該非常低,這樣,除了其他因素之外,可以在速度極低時(shí)檢測(cè)到軸承噪聲。但是,由此也可以看出,振動(dòng)傳感器制造商正面臨一個(gè)重大挑戰(zhàn),尤其對(duì)于多軸傳感器而言。只有少數(shù)幾家制造商能夠提供帶寬大于2kHz、噪聲足夠低的多軸傳感器。ADI公司(ADI)已開發(fā)出適合CBM應(yīng)用的ADXL356/ADXL357三軸傳感器系列。該系列產(chǎn)品具備出色的噪聲性能和溫度穩(wěn)定性。除了有限的1.5kHz(諧振頻率=5.5kHz)帶寬以外,這些加速度計(jì)仍能夠?yàn)轱L(fēng)輪機(jī)等低速設(shè)備提供重要的狀態(tài)監(jiān)控讀數(shù)。
ADXL100x系列中的單軸傳感器適用于更高帶寬。它們提供高達(dá)24kHz(諧振頻率=45kHz)的帶寬,且在噪聲水平極低的情況下,提供高達(dá)±100g的g范圍。由于具有高帶寬,該傳感器系列可以檢測(cè)出旋轉(zhuǎn)機(jī)械中的大部分故障問題(滑動(dòng)軸承損壞、失衡、摩擦、疏松、輪齒缺損、軸承磨損和氣蝕)。
基于狀態(tài)的監(jiān)控可以采用的分析方法
CBM中的機(jī)器狀態(tài)分析可以采用多種方法完成。最常見的方法是時(shí)域分析、頻率域分析,以及兩者共用。
1.基于時(shí)間的分析
在時(shí)域振動(dòng)分析中,會(huì)考慮有效值(均方根,即rms)、峰峰值和振動(dòng)幅度(見圖4)。
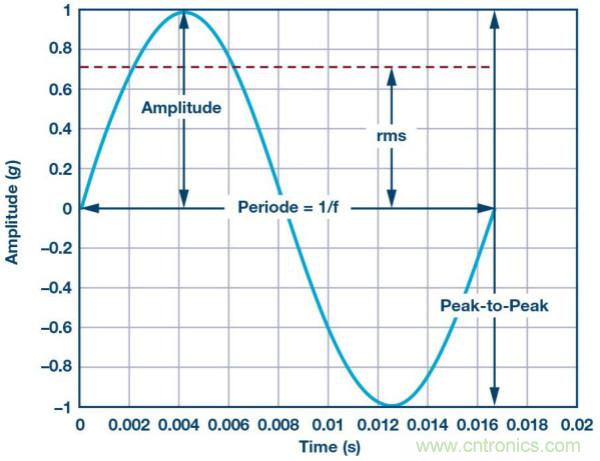
圖4:諧波振動(dòng)信號(hào)的幅度、有效值和峰峰值。
峰峰值反映電機(jī)軸的最大偏斜度,因此能夠得出最大載荷。振幅值則表示振動(dòng)的幅度,并且識(shí)別異常的振動(dòng)現(xiàn)象。但是,不會(huì)考慮振動(dòng)的時(shí)長(zhǎng)或者振動(dòng)期間的能量,以及振動(dòng)的破壞力。因此,有效值一般是最具意義的值,這是因?yàn)樗坏紤]振動(dòng)時(shí)長(zhǎng),還考慮振動(dòng)幅度值。通過分析所有這些參數(shù)對(duì)電機(jī)速度的依賴關(guān)系,可以獲得對(duì)rms振動(dòng)的統(tǒng)計(jì)閾值的相關(guān)性。
事實(shí)證明此類分析非常簡(jiǎn)單,因?yàn)樗炔恍枰镜南到y(tǒng)知識(shí),也不需要進(jìn)行任何類型的光譜分析。
2.基于頻率的分析
利用基于頻率的分析,可通過快速傅立葉變換(FFT)將隨時(shí)間變化的振動(dòng)信號(hào)分解為頻率分量。由此產(chǎn)生的幅度和頻率關(guān)系頻譜圖有助于監(jiān)控特定的頻率分量及其諧波和邊帶(見圖5)。
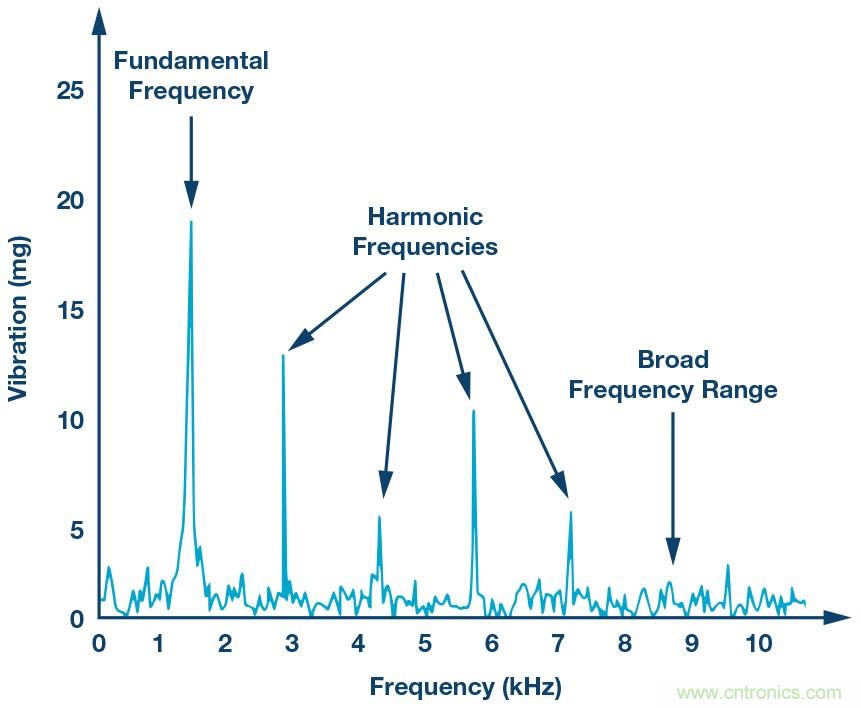
圖5:振動(dòng)與頻率關(guān)系頻譜圖。
FFT是一種在振動(dòng)分析中廣泛采用的方法,特別是用于檢測(cè)軸承損傷。采用這種方法,可以將相應(yīng)的組件分配給每個(gè)頻率分量。通過FFT,可以濾除滾動(dòng)部件與缺陷區(qū)域接觸引起某些故障時(shí)產(chǎn)生重復(fù)脈沖的主要頻率。因?yàn)樗鼈兊念l率分量不同,因此可以區(qū)分不同類型的軸承損傷(外環(huán)、內(nèi)環(huán)或滾珠軸承損傷)。但是,這需要軸承、電機(jī)和整個(gè)系統(tǒng)的準(zhǔn)確信息。
此外,F(xiàn)FT流程需要提供在微控制器中反復(fù)記錄和處理振動(dòng)的離散時(shí)間塊。盡管相比時(shí)域分析,這種分析需要更強(qiáng)的計(jì)算能力,但它能夠進(jìn)行更詳細(xì)的損傷分析。
3.時(shí)域和頻域分析組合
此類分析最全面,因?yàn)樗婢邇煞N方法的優(yōu)點(diǎn)。時(shí)域中的統(tǒng)計(jì)分析提供系統(tǒng)的振動(dòng)強(qiáng)度隨時(shí)間變化的信息,以及它們是否處于許可的范圍內(nèi)。頻域分析能夠以基本頻率的形式監(jiān)測(cè)速度,同時(shí)也能夠監(jiān)測(cè)準(zhǔn)確識(shí)別故障特征所需的諧波分量。
對(duì)基本頻率的跟蹤尤其具有決定性,這是因?yàn)橛行е岛推渌y(tǒng)計(jì)參數(shù)會(huì)隨速度而變化。如果與最后一次測(cè)量相比,統(tǒng)計(jì)參數(shù)發(fā)生顯著變化,則必須檢查基本頻率,以避免誤報(bào)。
對(duì)于這三種分析方法,其測(cè)量的數(shù)值都會(huì)隨時(shí)間發(fā)生變化。監(jiān)測(cè)系統(tǒng)可能首先需要記錄運(yùn)行狀況,或者生成所謂的指紋。然后與不斷記錄的數(shù)據(jù)進(jìn)行比較。在偏差過大,或超過相應(yīng)閾值的情況下,需要作出反應(yīng)。如圖6所示,可能的反應(yīng)可以是警告(2)或警報(bào)(4)。根據(jù)具體的嚴(yán)重程度,可能需要維修人員立即著手修正這些偏差。
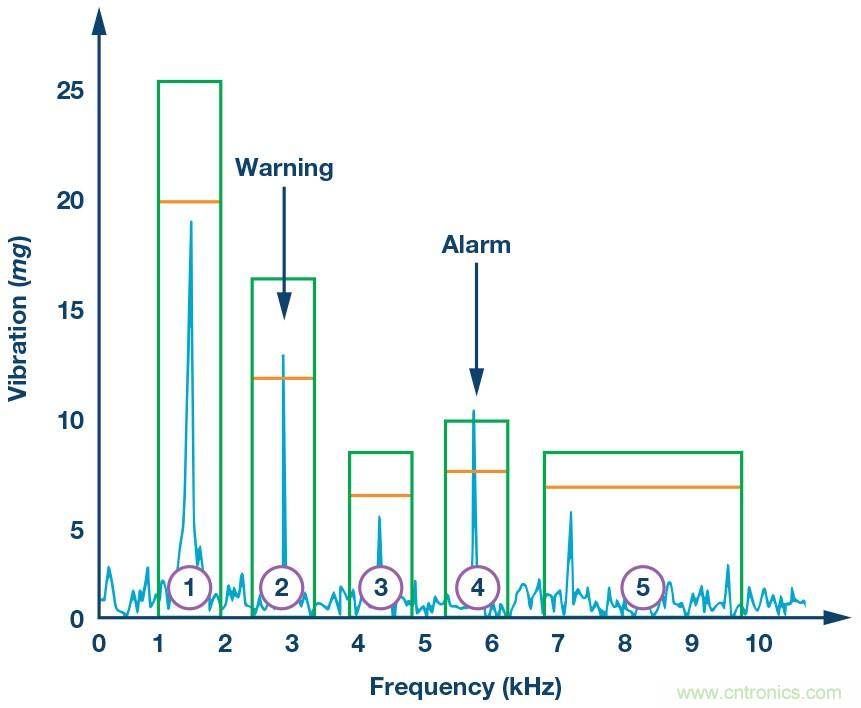
圖6:閾值和對(duì)FFT的反應(yīng)。
通過磁場(chǎng)分析實(shí)施CBM
由于集成磁力計(jì)的快速發(fā)展,測(cè)量電機(jī)周圍的雜散磁場(chǎng)是另一種對(duì)旋轉(zhuǎn)機(jī)器進(jìn)行狀態(tài)監(jiān)控的頗有前景的方法。測(cè)量采用非接觸式;也就是說,機(jī)械和傳感器之間不需要直接連接。與振動(dòng)傳感器一樣,磁場(chǎng)傳感器也有單軸和多軸版本。
對(duì)于故障檢測(cè),應(yīng)從軸向(平行于電機(jī)軸)和徑向(與電機(jī)軸呈直角)測(cè)量雜散磁場(chǎng)。徑向磁場(chǎng)通常被定子鐵芯和電機(jī)外殼削弱。與此同時(shí),還會(huì)受到氣隙磁通量的顯著影響。軸向磁場(chǎng)是由鼠籠式轉(zhuǎn)子的電流和定子的末端繞組產(chǎn)生的。磁力計(jì)的位置和方向?qū)τ谀芊駵y(cè)量?jī)蓚€(gè)磁場(chǎng)具有決定性的作用。因此,建議選擇靠近軸或電機(jī)外殼的合適位置。同時(shí)需要測(cè)量溫度,這絕對(duì)有必要,因?yàn)榇艌?chǎng)強(qiáng)度與溫度直接相關(guān)。因此,在大多數(shù)情況下,如今的磁場(chǎng)傳感器都包含集成式溫度傳感器。此外,還應(yīng)校準(zhǔn)傳感器,實(shí)施溫漂補(bǔ)償校正。
FFT用于對(duì)電機(jī)實(shí)施基于磁場(chǎng)的狀態(tài)監(jiān)控,就像振動(dòng)測(cè)量一樣。但是,對(duì)于電機(jī)狀態(tài)評(píng)估,即使是幾赫茲到大約120赫茲范圍的低頻也足夠了。線路頻率顯得很突出,而出現(xiàn)故障時(shí)則以低頻分量頻譜為主。
在鼠籠式轉(zhuǎn)子的轉(zhuǎn)桿破裂的情況下,滑動(dòng)值也具有決定性的作用。它與負(fù)載有關(guān),理想情況下無負(fù)載時(shí)為0%。采用額定負(fù)載時(shí),對(duì)于運(yùn)行正常的機(jī)器,其值在1%和5%之間,出現(xiàn)故障時(shí),會(huì)相應(yīng)增大。對(duì)于CBM,應(yīng)該在相同的負(fù)載條件下進(jìn)行測(cè)量,以消除負(fù)載不同帶來的影響。
預(yù)防性維護(hù)的狀態(tài)
無論是哪種類型的狀態(tài)監(jiān)測(cè),即使采用最智能的監(jiān)控方案,也無法百分之百保證不會(huì)出現(xiàn)意外的停機(jī)、故障或安全風(fēng)險(xiǎn)。只能降低這些風(fēng)險(xiǎn)。然而,預(yù)防性維護(hù)越來越受關(guān)注,正在成為行業(yè)的一個(gè)重要話題。它被認(rèn)為是生產(chǎn)設(shè)施未來取得可持續(xù)成功的一個(gè)明確的先決條件。然而,要做到這一點(diǎn),需要采用獨(dú)特的技術(shù),而且必須不斷創(chuàng)新,加速發(fā)展。盈虧赤字體現(xiàn)在客戶利益和成本比較中。
盡管如此,許多工業(yè)企業(yè)已經(jīng)認(rèn)識(shí)到預(yù)防性維護(hù)的重要性,它是決定能否成功的重要因素,因此也是開展未來業(yè)務(wù)的機(jī)會(huì)—這種機(jī)會(huì)并不僅僅局限于維修服務(wù)領(lǐng)域。盡管面臨巨大挑戰(zhàn),尤其是在數(shù)據(jù)分析領(lǐng)域,預(yù)防性維護(hù)目前已具備很高的技術(shù)可行性。但是,目前預(yù)防性維護(hù)具有強(qiáng)烈的機(jī)會(huì)主義特征。預(yù)計(jì)未來的業(yè)務(wù)模式將主要取決于軟件組件,硬件帶來的增值份額將不斷下降。總之,因?yàn)闄C(jī)器運(yùn)行時(shí)間較長(zhǎng),產(chǎn)生的價(jià)值較高,目前對(duì)預(yù)防性維護(hù)的硬件和軟件的投資已經(jīng)物有所值。
推薦閱讀:





