
【導(dǎo)讀】iPhone X的全面屏設(shè)計(jì),蘋果在該手機(jī)上取消了實(shí)體Home鍵,并且用Face ID人臉識(shí)別取代了以往Touch ID指紋識(shí)別。據(jù)稱此方法比 TouchID 更安全,誤差率低至 1:1,000,000。

什么是Face ID?
蘋果公司在iPhone X中使用了“TrueDepth攝像機(jī)系統(tǒng)”(也就是“齊劉海”部分),通過使用里面的傳感器和點(diǎn)陣投影儀,投射出3萬多個(gè)點(diǎn),就能形成一張完整的3D“臉譜”用來識(shí)別用戶臉部。據(jù)悉, iPhone X采用定制的芯片來處理人工智能工作負(fù)載,這是一個(gè)雙核的“ A11生物神經(jīng)網(wǎng)絡(luò)引擎”芯片,每秒運(yùn)算次數(shù)最高可達(dá)6000億次,該芯片賦能的最重要的事情就是使Face ID身份認(rèn)證功能能夠快速識(shí)別人臉。同時(shí),經(jīng)過不斷被訓(xùn)練的神經(jīng)網(wǎng)絡(luò)建模識(shí)別人臉,當(dāng)你的iPhone X識(shí)別你的臉部次數(shù)越多,它就會(huì)對(duì)你越熟悉。不管你是換發(fā)型、留胡子、戴帽子、戴眼鏡,還是光線強(qiáng)弱不同,它都會(huì)認(rèn)出你。
同為生物識(shí)別技術(shù),TouchID的解鎖錯(cuò)誤率是五萬分之一,而FaceID則是一百萬分之一,
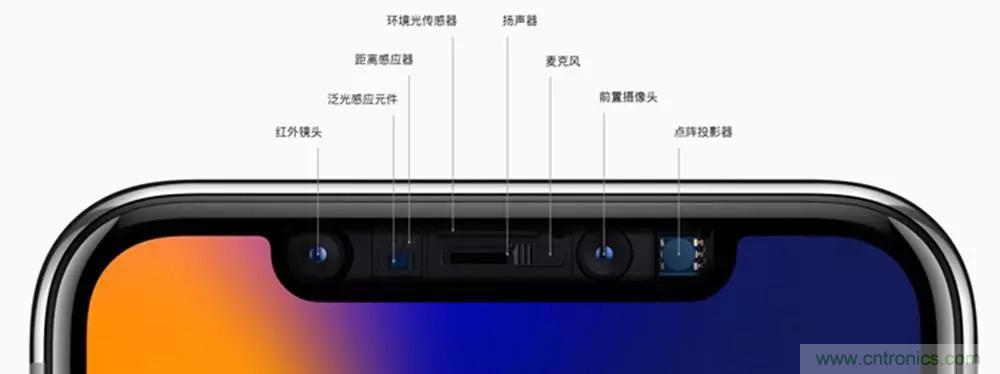
iPhoneX人臉識(shí)別功能主要靠劉海部位的原深感攝像頭實(shí)現(xiàn),主要包括距離感應(yīng)器、泛光感應(yīng)元件、點(diǎn)陣投影儀和紅外鏡頭。雖然iPhone X實(shí)際進(jìn)行人臉識(shí)別的過程非常復(fù)雜,不過可以簡化成以下幾個(gè)步驟:
1、檢測(cè)物體靠近:當(dāng)各位拿起手機(jī)時(shí),首先工作的是距離感應(yīng)器,它將會(huì)告訴iPhone X是否有物體進(jìn)行靠近;
2、檢測(cè)用戶臉部:泛光感應(yīng)元件采用垂直腔面發(fā)射激光器(VCSEL),POPPUR只要大家知道它會(huì)發(fā)射低功率紅外光就可以了。在距離感應(yīng)器檢測(cè)到物體后,泛光感應(yīng)元件就會(huì)對(duì)前方物體進(jìn)行掃描,由紅外鏡頭接收信息,并傳給A11芯片神經(jīng)網(wǎng)絡(luò)系統(tǒng)進(jìn)行判斷,識(shí)別為臉部后再進(jìn)行下一步操作。
3、獲取3D人臉信息:雖然檢測(cè)到是人臉,但是泛光感應(yīng)元件發(fā)出的只是簡單紅外光,并不能記錄空間信息,這時(shí)候點(diǎn)陣投影器發(fā)射的高功率紅外結(jié)構(gòu)光就派上用場(chǎng)了。結(jié)構(gòu)光一般指呈條紋狀或者點(diǎn)陣狀的特殊光線,這種光線在打到凹凸不平的物體表面時(shí)會(huì)造成圖像扭曲,從而獲得物體的空間深度信息。
4、結(jié)構(gòu)光接收:用于人臉識(shí)別的光線對(duì)精度要求比較高,不僅點(diǎn)陣投影儀發(fā)射的點(diǎn)要足夠多(三萬多個(gè)),同時(shí)還要防止環(huán)境光干擾,因此紅外鏡頭上還搭載濾光片,除了特定頻率的紅外光都會(huì)被剔除掉(為了保證感應(yīng)能力和避免太陽光的干擾,一般選擇800~900nm波長附近的近紅外光)。
5、收集完結(jié)構(gòu)光等信息后,手機(jī)通過3D圖像處理芯片可以生成具備空間信息的三維圖像。這些信息將會(huì)經(jīng)過特殊調(diào)制,以數(shù)據(jù)形式與保存在處理器的Secure Enclave的Face ID編碼(注冊(cè)Face ID時(shí)錄入的信息,無法被提取到手機(jī)外或者被傳到云端)進(jìn)行配對(duì),匹配度滿足蘋果設(shè)置的要求后手機(jī)就能實(shí)現(xiàn)解鎖。
事實(shí)上,近幾年來以來,業(yè)界對(duì)于臉部識(shí)別的應(yīng)用“屢試不爽”,但一直因?yàn)榘踩珕栴}被詬病。比如只需要通過一張電腦所有者的照片,就可以輕松進(jìn)入設(shè)置了臉部識(shí)別登錄方式的電腦;再比如流行科學(xué)作家丹·莫倫(Dan Moren)通過一個(gè)視頻就擊敗了阿里巴巴的面部識(shí)別系統(tǒng)。
蘋果的FaceID,采用的是結(jié)構(gòu)光雙攝方案,通過將3萬多個(gè)光點(diǎn)的網(wǎng)絡(luò)投射到人臉上,并隨著用戶轉(zhuǎn)動(dòng)頭部以映射臉部3D形狀,最終形成的是一個(gè)三維圖像,這也是目前安全性最高的人臉識(shí)別方案。而其它技術(shù)更多還是二維人臉解鎖的方案。
Face ID安全嗎?
蘋果iPhone X的面部識(shí)別功能中包含“注意力檢測(cè)”功能,這個(gè)功能可以確認(rèn)你是在清醒的狀態(tài)下使用手機(jī)。因此當(dāng)你睡覺時(shí),有人試圖解鎖你手機(jī)的行為將會(huì)失敗。
“注意力檢測(cè)”原理為人眼視線檢測(cè),檢測(cè)用戶視線方向,判斷用戶的注視區(qū)域,系眼球追蹤技術(shù)的一部分。這部分功能同樣是由“齊劉海”硬件實(shí)現(xiàn)(蘋果收購的眼動(dòng)追蹤企業(yè)SMI為技術(shù)提供方),利用紅外鏡頭和泛光感應(yīng)元件,實(shí)現(xiàn)人眼瞳孔的特征定位,在通過AI芯片A11的深度學(xué)習(xí)估算人眼視線方向。
在操作應(yīng)用上其中涉及的公開專利原理摘要為,一種方法包括接收計(jì)算機(jī)化系統(tǒng)的用戶的身體至少一部分的三維(3D)映射序列,并從3D映射中提取用戶頭部的3D坐標(biāo) ?;陬^部的3D坐標(biāo),識(shí)別由用戶執(zhí)行的注視方向以及在耦合到計(jì)算機(jī)化系統(tǒng)的顯示器上,在注視方向上呈現(xiàn)的交互項(xiàng)目。從3D映射中提取指示;指示用戶正在特定方向上移動(dòng)身體的肢體,并且響應(yīng)于該指示,將所識(shí)別的交互項(xiàng)目重新定位在顯示器上。
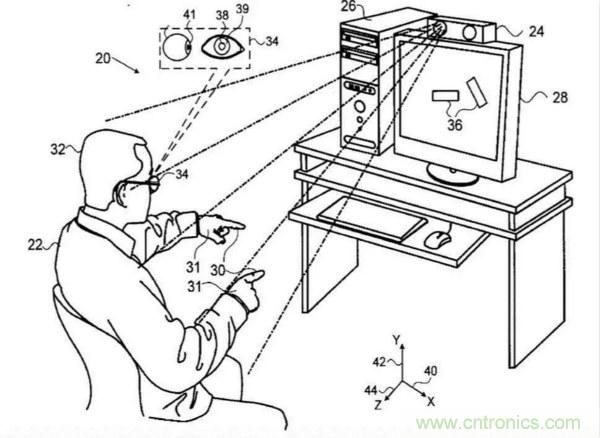
這項(xiàng)于2016年12月份公開的專利,即是注意力檢查的原理,將上圖的PC機(jī)及攝像設(shè)備想象縮小到手機(jī)端,用戶只有在眼睛注意力集中在一個(gè)圓圈中,同時(shí)它會(huì)要求用戶將頭部放在同一個(gè)圓圈中。這一步驟同時(shí)完成人臉圖像掃描,以及注視點(diǎn)映射。
當(dāng)今視線檢測(cè)技術(shù)的精度可以達(dá)到1°以下,一些多年從事眼動(dòng)分析的技術(shù)公司可以做到0.4°的高精度。按照1°的偏差精度來計(jì)算,當(dāng)用戶注視iPhone X手機(jī)屏幕圓圈時(shí),視線偏差距離不超過5mm。因此,通過“注意力檢測(cè)”技術(shù),當(dāng)人眼的關(guān)注視線落在手機(jī)屏幕上時(shí),F(xiàn)ace ID認(rèn)為此時(shí)用戶傳達(dá)了交互的目的,即進(jìn)行解鎖。而在用戶視線偏離手機(jī)屏幕時(shí),“注意力檢測(cè)”結(jié)果將幫助Face ID不要誤解鎖手機(jī)。

Face ID會(huì)失效嗎?
Face ID為滿足不同時(shí)段不同環(huán)境對(duì)攝像頭的要求,如白天、黑夜、室內(nèi)、室外。攝像頭會(huì)使用紅外光(泛光感應(yīng)元件)照亮你的臉,使用紅外鏡頭捕捉圖像。以下是人臉識(shí)別的具體步驟:
1、首先,把IR圖像從相機(jī)發(fā)送到iPhone X的神經(jīng)引擎里,以構(gòu)建用戶的人臉3D模型
2、將用戶的3D模型或“驗(yàn)證圖像”在計(jì)算機(jī)算法中呈現(xiàn),并將其與用戶存儲(chǔ)的模板或“設(shè)置圖像”進(jìn)行比較;
3、根據(jù)這兩個(gè)圖像之間的相似度得出對(duì)比數(shù)值,看驗(yàn)證圖像和設(shè)置圖像是否匹配;
4、如果對(duì)比數(shù)值高于某個(gè)確定數(shù)值,iPhone X會(huì)通過你的身份驗(yàn)證并解鎖。
因此,F(xiàn)ace ID是否會(huì)失效要看蘋果對(duì)于閾值的設(shè)定,如果設(shè)定較高的閾值,相應(yīng)失效問題就會(huì)小很多。

2D人臉識(shí)別技術(shù)與3D人臉識(shí)別技術(shù)
對(duì)于刷臉消費(fèi)、刷臉解鎖這些“黑科技”,人們其實(shí)一點(diǎn)都不陌生,但如果要深入其中,普通人也只能說出一個(gè)關(guān)鍵詞:人臉識(shí)別。而人臉識(shí)別技術(shù)實(shí)際上可以區(qū)分為2D和3D兩種。
1、2D人臉識(shí)別:2D人臉識(shí)別是目前最為常見的人臉識(shí)別技術(shù)之一,其工作原理是后期人臉識(shí)別系統(tǒng)對(duì)圖片中的人臉進(jìn)識(shí)別,通過設(shè)定數(shù)百或數(shù)千個(gè)點(diǎn),并記錄點(diǎn)與點(diǎn)之間的函數(shù),該函數(shù)即為此人的面部信息。
2、3D人臉識(shí)別: 3D人臉識(shí)別是采用3D結(jié)構(gòu)光技術(shù),通過3D結(jié)構(gòu)光內(nèi)的數(shù)萬個(gè)光線點(diǎn)對(duì)人臉進(jìn)行掃描后,從而提供更為精確的面部信息,而這類面部信息并不會(huì)受到口紅、粉底等化妝品的影響。與2D人臉識(shí)別相比,3D人臉識(shí)別將提供更為精確的面部數(shù)據(jù),最終讓數(shù)據(jù)更加安全可靠。
“普通視覺傳感設(shè)備讓萬物看到世界,而3D傳感技術(shù)則讓萬物能像人一樣‘看清’世界。”

3D傳感技術(shù)原理
要談3D傳感技術(shù),就必須先弄清楚光學(xué)測(cè)量分類以及其原理。
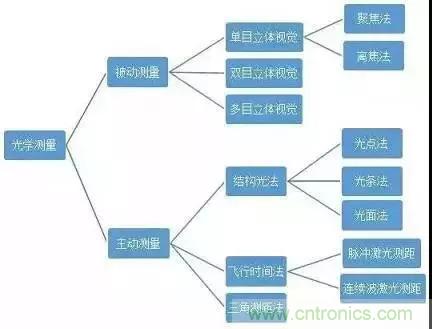
光學(xué)測(cè)量分為主動(dòng)測(cè)距法和被動(dòng)測(cè)距法。主動(dòng)測(cè)距方法的基本思想是利用特定的、人為控制光源和聲源對(duì)物體目標(biāo)進(jìn)行照射,根據(jù)物體表面的反射特性及光學(xué)、聲學(xué)特性來獲取目標(biāo)的三維信息。其特點(diǎn)是具有較高的測(cè)距精度、抗干擾能力和實(shí)時(shí)性,具有代表性的主動(dòng)測(cè)距方法有結(jié)構(gòu)光法、飛行時(shí)間法、和三角測(cè)距法。
主動(dòng)測(cè)距法
結(jié)構(gòu)光法
根據(jù)投影光束形態(tài)的不同,結(jié)構(gòu)光法又可分為光點(diǎn)式結(jié)構(gòu)光法、光條式結(jié)構(gòu)光法和光面式結(jié)構(gòu)光法等。
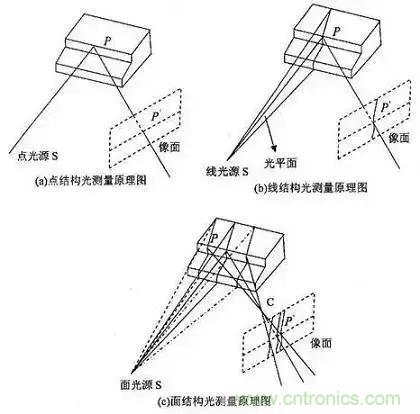
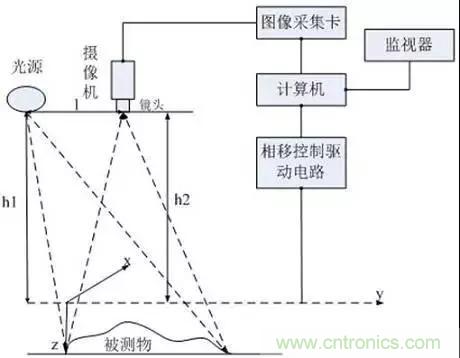
目前應(yīng)用中較廣,且在深度測(cè)量中具有明顯優(yōu)勢(shì)的方法是面結(jié)構(gòu)光測(cè)量法。面結(jié)構(gòu)光測(cè)量將各種模式的面結(jié)構(gòu)投影到被測(cè)物體上,例如將分布較密集的均勻光柵投影到被測(cè)物體上面,由于被測(cè)物體表面凹凸不平,具有不同的深度,所以表面反射回來的光柵條紋會(huì)隨著表面不同的深度發(fā)生畸變,這個(gè)過程可以看作是由物體表面的深度信息對(duì)光柵的條紋進(jìn)行調(diào)制。所以被測(cè)物體的表面信息也就被調(diào)制在反射回來的光柵之中。通過被測(cè)物體反射回來的光柵與參考光柵之間的幾何關(guān)系,分析得到每一個(gè)被測(cè)點(diǎn)之間的高度差和深度信息。
結(jié)構(gòu)光的優(yōu)點(diǎn)是計(jì)算簡單,測(cè)量精度較高,對(duì)于平坦的、無明顯紋理和形狀變化的表面區(qū)域都可進(jìn)行精密的測(cè)量。其缺點(diǎn)是對(duì)設(shè)備和外界光線要求高,造價(jià)昂貴。目前,結(jié)構(gòu)光法主要應(yīng)用在條件良好的室內(nèi)。
飛行時(shí)間法(ToF)
飛行時(shí)間(Time of Flight,簡稱ToF)法,又叫做激光雷達(dá)(LiDAR)測(cè)距法。它將脈沖激光信號(hào)投射到物體表面,反射信號(hào)沿幾乎相同路徑反向傳至接收器,利用發(fā)射和接收脈沖激光信號(hào)的時(shí)間差可實(shí)現(xiàn)被測(cè)量表面每個(gè)像素的距離測(cè)量。
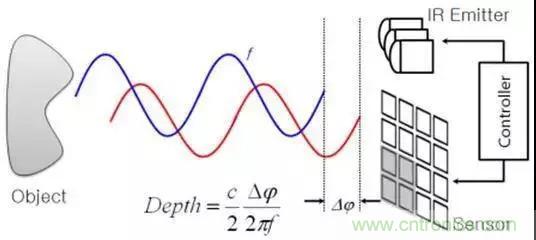
ToF直接利用光傳播特性,不需要進(jìn)行灰度圖像的獲取與分析,因此距離的獲取不受物體表面性質(zhì)的影響,可快速準(zhǔn)確地獲取景物表面完整的三維信息。缺點(diǎn)則是需要較復(fù)雜的光電設(shè)備,價(jià)格偏貴。
三角測(cè)距法
三角測(cè)距法又稱主動(dòng)三角法,是基于光學(xué)三角原理,根據(jù)光源、物體和檢測(cè)器三者之間的幾何成像關(guān)系來確定空間物體各點(diǎn)的三維坐標(biāo)。在實(shí)際測(cè)量過程中,它常用激光作為光源,用CCD相機(jī)作為檢測(cè)器。這種方式主要用于工業(yè)勘探、工件表面粗糙度檢測(cè)、輪胎檢測(cè)、飛機(jī)檢測(cè)等工業(yè)、航空、軍事領(lǐng)域,在消費(fèi)電子類產(chǎn)品還不曾涉及。
被動(dòng)測(cè)距法
被動(dòng)測(cè)距技術(shù)不需要人為地設(shè)置輻射源,只利用場(chǎng)景在自然光照下的二維圖像來重建景物的三維信息,具有適應(yīng)性強(qiáng)、實(shí)現(xiàn)手段靈活、造價(jià)低的優(yōu)點(diǎn)。但是這種方法是用低維信號(hào)來計(jì)算高維信號(hào)的,所以其使用的算法復(fù)雜。被動(dòng)測(cè)距按照使用的視覺傳感器數(shù)量可分為單目視覺、雙目立體視覺和多目視覺三大類。
單目視覺
單目視覺是指僅利用一臺(tái)照相機(jī)拍攝一張相片來進(jìn)行測(cè)量。因僅需要一臺(tái)相機(jī),所以該方法的優(yōu)點(diǎn)是結(jié)構(gòu)簡單、相機(jī)標(biāo)定容易,同時(shí)還避免了立體視覺的小視場(chǎng)問題和匹配困難問題。
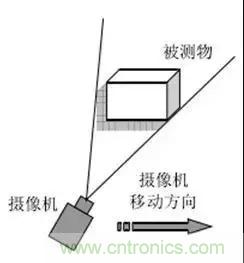
單目視覺方法又可分聚焦法和離焦法兩類。聚焦法是指首先使相機(jī)相對(duì)于被測(cè)點(diǎn)處于聚焦位置,然后根據(jù)透鏡成像公式求得被測(cè)點(diǎn)相對(duì)于相機(jī)的距離。相機(jī)偏離聚焦位置會(huì)帶來測(cè)量誤差,因此尋求精確的聚焦位置是關(guān)鍵所在。而離焦法不要求相機(jī)相對(duì)于被測(cè)點(diǎn)處于聚焦位置,而是根據(jù)標(biāo)定出的離焦模型計(jì)算被測(cè)點(diǎn)相對(duì)于相機(jī)的距離,這樣就避免了由于尋求精確的聚焦位置而降低測(cè)量效率的問題,但離焦模型的準(zhǔn)確標(biāo)定是該方法的主要難點(diǎn)。
雙目立體視覺
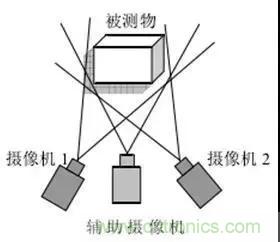
雙目立體視覺的基本原理是從兩個(gè)視點(diǎn)觀察同一景物,以獲取在不同視角下的感知圖像,然后通過三角測(cè)量原理計(jì)算圖像像素間的位置偏差(視差)來獲取景物的三維信息。這一過程與人類視覺感知過程是類似的。
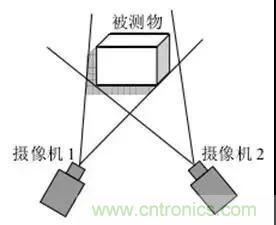
在雙目立體視覺系統(tǒng)的硬件結(jié)構(gòu)中,通常采用兩個(gè)攝像機(jī)作為視覺信號(hào)的采集設(shè)備,通過雙輸入通道圖像采集卡與計(jì)算機(jī)連接,把攝像機(jī)采集到的模擬信號(hào)經(jīng)過采樣、濾波、強(qiáng)化、模數(shù)轉(zhuǎn)換,最終向計(jì)算機(jī)提供圖像數(shù)據(jù)。一個(gè)完整的雙目立體視覺系統(tǒng)通??煞譃閿?shù)字圖像采集、相機(jī)標(biāo)定、圖像預(yù)處理與特征提取、圖像校正、立體匹配、三維重建六大部分。
多目立體視覺
多目立體視覺系統(tǒng)是對(duì)雙目視覺系統(tǒng)的一種拓展。所謂多目立體視覺系統(tǒng),就是采用多個(gè)攝像機(jī)設(shè)置于多個(gè)視點(diǎn),或者由一個(gè)攝像機(jī)從多個(gè)視點(diǎn)觀測(cè)三維景物的視覺系統(tǒng)。
對(duì)多目系統(tǒng)所采集到的景物圖像進(jìn)行感知、識(shí)別和理解的技術(shù)被稱為多目立體視覺系統(tǒng)技術(shù)。在雙目立體視覺中,對(duì)于給定的物體距離,視差與基線長度成正比,基線越長,對(duì)距離的計(jì)算越精確。但是當(dāng)基線過長時(shí),需要在相對(duì)較大的視覺范圍內(nèi)進(jìn)行搜索,從而增加計(jì)算量。利用多基線立體匹配是消除誤匹配、提高視差測(cè)量準(zhǔn)確性的有效方法之。基線數(shù)目的增加可以通過增加相機(jī)來實(shí)現(xiàn)。
光電3D影像技術(shù)
根據(jù)獲取圖像信息方法的不同,光電3D影像技術(shù)分為有源和無源兩種技術(shù),無源技術(shù)主要是接受物體的輻射或者環(huán)境的發(fā)射,有源技術(shù)是通過投射一束調(diào)制的或未調(diào)制的光到物體上通過檢測(cè)物體反射的光來形成3D圖像。
以前大多數(shù)技術(shù)研究集中在無源3D技術(shù)上,利用三角測(cè)量原理,通過兩臺(tái)相距一定距離的照相機(jī),左邊照相機(jī)產(chǎn)生的圖像表示深度信息,右邊照相機(jī)產(chǎn)生差異的二維圖像。關(guān)鍵是產(chǎn)生深度信息的照相機(jī)需要分離出深度信息。無源3D影像技術(shù)需要拍攝的物體具有突出的輪廓特點(diǎn),比如邊緣、角、線等。其優(yōu)點(diǎn)是不需要特殊的硬件條件,并成功使用在好幾個(gè)方面。這種技術(shù)的缺點(diǎn)是需要兩臺(tái)或者更多的高質(zhì)量的照相機(jī)、圖像處理軟件。圖像質(zhì)量、拍照速度、數(shù)據(jù)傳輸?shù)榷际沁@種機(jī)制能否被廣泛應(yīng)用的限制因素。
有源3D光電圖像方法是投射一束有規(guī)律的空間分布的線狀光到物體上從而產(chǎn)生一個(gè)網(wǎng)狀格的深度。廣泛使用的有源光方法是飛行時(shí)間(time off light)方法,最近幾年,市場(chǎng)上出現(xiàn)的3D照相機(jī)都是基于飛行時(shí)間方法,這些3D照相機(jī)主要應(yīng)用于工業(yè)控制,通過飛行時(shí)間方法檢測(cè)相位來實(shí)現(xiàn)3D影像。一束幾十兆赫茲被調(diào)制的近紅外光照射到物體上,物體反射的光進(jìn)入3D照相機(jī),由于立體物體的遠(yuǎn)近距離不同,反射光的相位存在一個(gè)延遲,通過檢測(cè)原始光束以及反射光束的相位延遲從而檢測(cè)出物體的景深,從而實(shí)現(xiàn)3D圖像。這種3D圖像傳感器的制作由ZMD公司完成,ZMD公司根據(jù)3D圖像傳感器需要高速的特點(diǎn)從噪聲和速度進(jìn)行工藝優(yōu)化,響應(yīng)速度可以到100MHz以上。
3D傳感技術(shù)的應(yīng)用
其實(shí),除了用于手機(jī)的人臉識(shí)別,3D傳感技術(shù)已經(jīng)應(yīng)用到了很多方面,在2018中國互聯(lián)網(wǎng)大會(huì)上,有國人廠家推出的智慧家庭新生態(tài)解決方案,賦予電視3D人臉識(shí)別、精準(zhǔn)內(nèi)容推薦、手勢(shì)交互等創(chuàng)新功能,顛覆智慧家庭客廳體驗(yàn)。通過3D人臉識(shí)別技術(shù),電視可在不獲取用戶隱私的前提下,精準(zhǔn)識(shí)別出機(jī)頂盒前的觀眾的用戶畫像信息,包括性別、年齡、情緒等等。同時(shí),系統(tǒng)根據(jù)登錄的用戶角色信息,通過綜合統(tǒng)計(jì)分析該用戶角色的行為數(shù)據(jù),可為用戶提供“千人千面”的個(gè)性化EPG界面,精準(zhǔn)推薦電視節(jié)目、視頻點(diǎn)播、游戲應(yīng)用等內(nèi)容。

此外,3D傳感技術(shù)可以賦能各行各業(yè):首先是機(jī)器人廠商,尤其是服務(wù)性機(jī)器人的眼睛需要3D視覺技術(shù),去感知周邊的環(huán)境,例如目標(biāo)距離、障礙物等信息;其次是安防廠商,在傳統(tǒng)的安防攝像頭里面再加裝一個(gè)視覺傳感器,就可以獲得一個(gè)更加精準(zhǔn)的三維立體信息;還有門禁門鎖,3D的刷臉識(shí)別相比2D的刷臉識(shí)別,安全等級(jí)和精準(zhǔn)性可以提升一級(jí);最后,就手機(jī)行業(yè)的發(fā)展趨勢(shì)來說,3D傳感技術(shù)未來的應(yīng)用空間很大,刷臉等生物識(shí)別都離不開3D傳感技術(shù),此外VR、AR、美顏也可以搭載3D傳感技術(shù)去做一些交互性、娛樂性的體驗(yàn)。還有各種各樣的智能硬件,凡是需要采集物體深度信息的相關(guān)功能,都會(huì)用到3D傳感技術(shù)。
推薦閱讀:



