
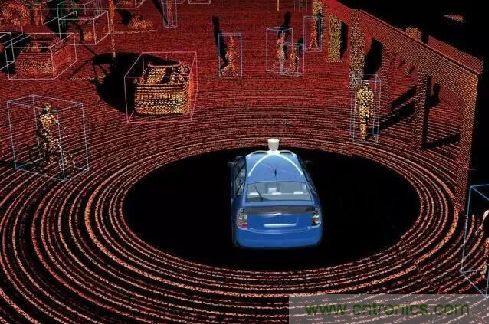
【導讀】無人駕駛汽車怎么自動駕駛呢?靠的是LIDAR,即激光雷達傳感器,它也被稱為無人駕駛汽車的眼睛。 LIDAR是個合成詞,取自“light”(光)和“radar”(雷達)。顧名思義,此類傳感器是靠向物體發(fā)出光,通過測量光反射所用的時間來檢視周圍壞境的。用在無人駕駛汽車上,功能很強大,只是目前LIDAR的設計笨重且價格不菲。

激光雷達,英文全稱為Light Detection And Ranging,簡稱LiDAR,即光探測與測量,是一種集激光、全球定位系統(tǒng)(GPS)和IMU(Inertial Measurement Unit,慣性測量裝置)三種技術(shù)于一身的系統(tǒng),用于獲得數(shù)據(jù)并生成精確的DEM(數(shù)字高程模型)。這三種技術(shù)的結(jié)合,可以高度準確地定位激光束打在物體上的光斑,測距精度可達厘米級,激光雷達最大的優(yōu)勢就是“精準”和“快速、高效作業(yè)”。它是一種用于精確獲得三維位置信息的傳感器,其在機器中的作用相當于人類的眼睛,能夠確定物體的位置、大小、外部形貌甚至材質(zhì)。
LiDAR通過測量激光信號的時間差、相位差確定距離,通過水平旋轉(zhuǎn)掃描或相控掃描測角度,并根據(jù)這兩個數(shù)據(jù)建立二維的極坐標系;再通過獲取不同俯仰角度的信號獲得第三維的高度信息。
高頻激光可在一秒內(nèi)獲取大量(106-107數(shù)量級)的位置點信息(稱為點云),并根據(jù)這些信息進行三維建模。除了獲得位置信息外,它還可通過激光信號的反射率初步區(qū)分不同材質(zhì)。
激光雷達是自動駕駛的關(guān)鍵技術(shù)
Lidar大致分為機載和地面兩大類應用,其中機載激光雷達是一種安裝在飛機上的機載激光探測和測距系統(tǒng),可以量測地面物體的三維坐標。早在上世紀七十年代,由美國航天局研發(fā),LIDAR測繪技術(shù)空載激光掃瞄技術(shù)開始了發(fā)展,并且速度飛快,約在1995年開始商業(yè)化。
除了軍事領域的應用,激光雷達也迅速向民用市場擴展。其中,無人駕駛可以說是最熱門的一個應用。

將Lidar應用于自動駕駛,要追溯到美國的DARPA (美國國防高等研究計劃署),它每年都會舉辦無人駕駛汽車挑戰(zhàn)賽,在2007年的DARPA挑戰(zhàn)賽上,7支參賽隊伍中的6支都采用了Velodyne公司設計的Lidar,最終的第一二名就出自這六只參賽隊。這引起了準備研發(fā)無人駕駛車的谷歌的注意,之后谷歌組建了隊伍,據(jù)稱,最初的人員就來自這些參賽隊員。谷歌于2009年推出無人駕駛汽車項目,在其無人車原型中使用的就是Velodyne公司的Lida。
激光雷達在無人車市場的應用
近幾年,無人駕駛汽車市場發(fā)展火熱,谷歌之后,百度、Uber等主流無人駕駛汽車研發(fā)團隊都在使用激光雷達作為傳感器之一,與圖像識別等技術(shù)搭配使用,使汽車實現(xiàn)對路況的判斷。
傳統(tǒng)的汽車廠商也紛紛開始研發(fā)無人駕駛汽車,包括大眾、日產(chǎn)、豐田等公司都在研發(fā)和測試無人駕駛汽車技術(shù),他們也都采用了激光雷達。

激光雷達的特點
Lidar系統(tǒng)測量3D空間中每個像素到發(fā)射器間的距離和方向,通過傳感器創(chuàng)造出真實世界完整的3D模型。操作Lidar系統(tǒng)的基本方法是發(fā)射一束激光,然后測量光在物體表面反射而返回來的信號。Lidar模塊接收到反射回來的信號所需的時間提供了一種直接測量Lidar系統(tǒng)與物體之間的距離的手段。關(guān)于物體的額外的信息,比如它的速率或材料成分,也可以通過測量反射回來的信號中的某些特性而得以確定,這些特性包括誘導多普勒頻移(induced Doppler shift)。最后,通過操控發(fā)射出去的光,可以測量出環(huán)境中許多不同的點,從而創(chuàng)建出完整的3D模型。
激光雷達(LiDAR)類似于雷達(radar),但是分辨率更高,因為光的波長大約比無線電的波長小10萬倍。它可以區(qū)分真實移動中的行人和人物海報、在三維立體的空間中建模、檢測靜態(tài)物體、精確測距。
Lidar是通過發(fā)射激光束來探測目標位置、速度等特征量的雷達系統(tǒng),具有測量精度高、方向性好等優(yōu)點,具體如下:
1、具有極高的分辨率
激光雷達工作于光學波段,頻率比微波高2~3個數(shù)量級以上,因此,與微波雷達相比,激光雷達具有極高的距離分辨率、角分辨率和速度分辨率;
2、抗干擾能力強
激光波長短,可發(fā)射發(fā)散角非常?。?mu;rad量級)的激光束,多路徑效應小(不會形成定向發(fā)射,與微波或者毫米波產(chǎn)生多路徑效應),可探測低空/超低空目標;
3、獲取的信息量豐富
可直接獲取目標的距離、角度、反射強度、速度等信息,生成目標多維度圖像;
4、可全天時工作
激光主動探測,不依賴于外界光照條件或目標本身的輻射特性。它只需發(fā)射自己的激光束,通過探測發(fā)射激光束的回波信號來獲取目標信息。
但是激光雷達最大的缺點——容易受到大氣條件以及工作環(huán)境的煙塵的影響,要實現(xiàn)全天候的工作環(huán)境是非常困難的事情。
激光雷達的原理與結(jié)構(gòu)
與雷達原理相似,激光雷達使用的技術(shù)是飛行時間(TOF, Time of Flight)。具體而言,就是根據(jù)激光遇到障礙物后的折返時間,計算目標與自己的相對距離。激光光束可以準確測量視場中物體輪廓邊沿與設備間的相對距離,這些輪廓信息組成所謂的點云并繪制出3D環(huán)境地圖,精度可達到厘米級別,從而提高測量精度。
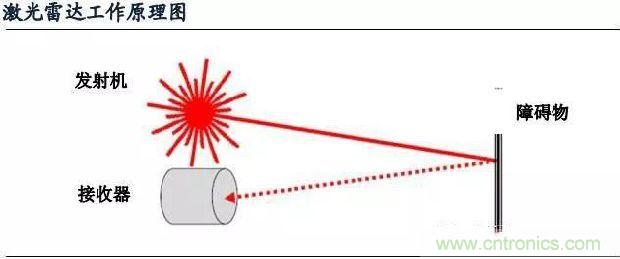
想象一下,當發(fā)出光脈沖時啟動秒表,然后當光脈沖(從遇到的第一個物體反射出來)返回時停止計時器。通過測量激光的“飛行時間”,并且知道脈沖行進的速度,就可以計算距離。光以每秒30萬千米的速度傳播,因此需要非常高精度的設備來產(chǎn)生關(guān)于距離的數(shù)據(jù)。
為了產(chǎn)生完整的點云,傳感器必須能夠非常快速地對整個環(huán)境進行采樣。激光雷達能夠做到這一點的一種方式是通過在單個發(fā)射器/接收器上使用非常高的采樣率。 每個發(fā)射器每秒發(fā)射數(shù)萬或數(shù)十萬個激光脈沖。這意味著,多達100000個激光脈沖在1秒內(nèi)完成從激光器單元上的發(fā)射器到被測量的物體的往返行程,并返回到激光雷達單元上位于發(fā)射器附近的接收器。
然而,固定線不足以映射整個環(huán)境——它只是在非常集中的區(qū)域給出非常清晰的分辨率。因此,許多激光雷達系統(tǒng)使用旋轉(zhuǎn)組件或旋轉(zhuǎn)鏡來使線圍繞環(huán)境進行360度掃描。常見的策略包括使單個發(fā)射器和接收器向上或下偏轉(zhuǎn)使激光器視野覆蓋范圍更大。 例如,Velodyne的64線激光雷達系統(tǒng)具有26.8度的垂直視角(通過旋轉(zhuǎn)使其擁有360的度水平視角)。這個激光雷達可以從50米開外看到一個12米高的物體的頂部。
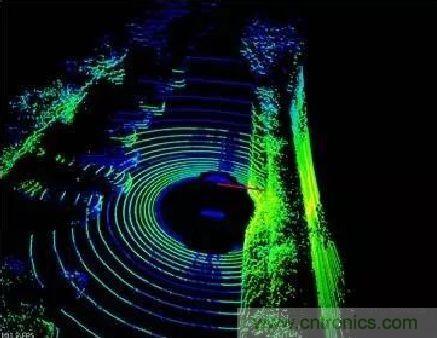
下圖中可以看到,距離激光雷達的遠近不同,點云的疏密程度也不相同,這是由于數(shù)據(jù)保真度隨著距離而下降。雖然它不是完美的,但是較高分辨率可用于較近的物體,因為隨著到傳感器的距離增加,發(fā)射器之間的角度(例如,2度)會導致這些點帶之間的間隔更大。
在ADAS系統(tǒng)中,激光雷達通過透鏡、激光發(fā)射及接收裝置,基于TOF飛行時間原理獲得目標物體位置、移動速度等特征數(shù)據(jù)并將其傳輸給數(shù)據(jù)處理器;同時,汽車的速度、加速度、方向等特征數(shù)據(jù)也將通過CAN總線傳輸?shù)綌?shù)據(jù)處理器;數(shù)據(jù)處理器對目標物體及汽車本身的信息數(shù)據(jù)進行綜合處理并根據(jù)處理結(jié)果發(fā)出相應的被動警告指令或主動控制指令,以此實現(xiàn)輔助駕駛功能。
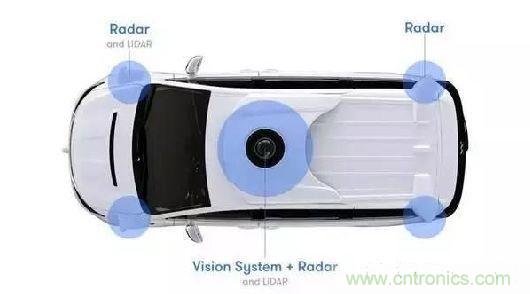
下圖展現(xiàn)的是谷歌無人駕駛公司W(wǎng)aymo在汽車上使用的激光雷達的布局:
激光雷達的分類
激光雷達按有無機械旋轉(zhuǎn)部件分類,包括機械激光雷達和固態(tài)激光雷達。機械激光雷達帶有控制激光發(fā)射角度的旋轉(zhuǎn)部件,而固態(tài)激光雷達則依靠電子部件來控制激光發(fā)射角度,無需機械旋轉(zhuǎn)部件。
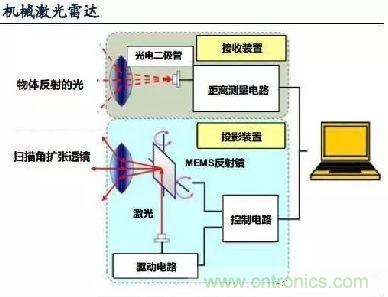
機械激光雷達由光電二極管、MEMS反射鏡、激光發(fā)射接受裝置等組成,其中機械旋轉(zhuǎn)部件是指圖中可360°控制激光發(fā)射角度的MEMS發(fā)射鏡。
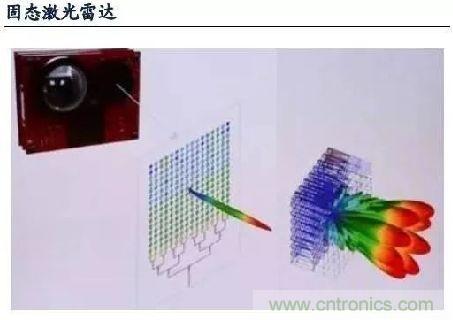
固態(tài)激光雷達與機械雷達不同,它通過光學相控陣列(Optical Phased Array)、光子集成電路(Photonic IC)以及遠場輻射方向圖(Far Field Radiation Pattern)等電子部件代替機械旋轉(zhuǎn)部件實現(xiàn)發(fā)射激光角度的調(diào)整。
光學相控陣和微波相控陣是一個原理,利用的是光的相干干涉,出現(xiàn)了相位差,也就出現(xiàn)了干涉峰。所以如何讓通過器件后光產(chǎn)生相位差是研究的重點,這就需要找到合適的材料和激發(fā)方法?,F(xiàn)在的激發(fā)方法主要是電光掃描,也就是通過加電使材料產(chǎn)生相位差?,F(xiàn)在兩種比較熱,一個是光波導陣列,一個是MEMS器件的,MEMS器件這個優(yōu)點是掃描的速度快,但是感覺不是那么必要,因為瓶頸還是在掃描角度這兒,所以現(xiàn)在MEMS原理的商業(yè)產(chǎn)品還沒有看到。
光波導陣列通過加電方式來實現(xiàn)光束掃描,利用光波導電光效應,對波導芯層加載電壓,使每個波導芯層具有不同的附加折射率,波束得以在波導陣元輸出截面光場具有不同的附加相位差,相位差按一定規(guī)律分布可引起輸出光速的偏轉(zhuǎn)。通過相位差按照一定規(guī)律分布輸出,從而實現(xiàn)光束的掃描。
固態(tài)激光雷達優(yōu)勢:響應速度快,控制電壓低,掃描角度大,價格低。
由于內(nèi)部結(jié)構(gòu)有所差別,兩種激光雷達的體積大小也不盡相同。機械激光雷達體積較大、價格昂貴、測量精度相對較高,一般置于汽車外部。固態(tài)激光雷達尺寸較小、性價比較高、測量精度相對低一些,但可隱藏于汽車車體內(nèi),不會破壞外形美觀。
根據(jù)線束數(shù)量的多少,激光雷達又可分為單線束激光雷達與多線束激光雷達。
顧名思義,單線束激光雷達掃描一次只產(chǎn)生一條掃描線, 其所獲得的數(shù)據(jù)為2D數(shù)據(jù),因此無法區(qū)別有關(guān)目標物體的3D信息。不過, 由于單線束激光雷達具有測量速度快、數(shù)據(jù)處理量少等特點, 多被應用于安全防護、地形測繪等領域。
傳統(tǒng)的激光雷達掃描視場非常小,如果想360度的觀察周圍,怎么辦?最自然的辦法就是多搞幾束激光,線數(shù)越多覆蓋的角度越大。

多線束激光雷達掃描一次可產(chǎn)生多條掃描線,目前市場上多線束產(chǎn)品包括4線束、8線束、16線束、32線束、64線束等,其細分可分為2.5D激光雷達及3D激光雷達。2.5D激光雷達與3D激光雷達最大的區(qū)別在于激光雷達垂直視野的范圍,前者垂直視野范圍一般不超過10°,而后者可達到30°甚至40°以上,這也就導致兩者對于激光雷達在汽車上的安裝位置要求有所不同。
激光雷達的參數(shù)指標
測量距離、測量精度、測量速率、角度分辨率是決定三維激光雷達性能的幾個重要指標。

例如,在無人駕駛汽車這個應用領域,對激光雷達的探測距離是有要求的。比如說高速公路上要能夠檢測到前方車輛,還有在十字路口上,要能夠觀測馬路對面的汽車。
有趣的是,精度不是越高越好。激光雷達獲取的的數(shù)據(jù)可以進行障礙物識別、動態(tài)物體檢測及定位,如果精度太差就無法達到以上目的;但是,精度太好也有問題,高精度對激光雷達的硬件提出很大的要求,計算量會非常大,成本也會非常高。所以精度應該是適中就好。
還有一點不能忽視的是角分辨率,角分辨率決定打出去后的兩個激光點之間的距離。單點測距精度達到后,如果打到物體表面兩點間距離(點位)太遠,測距精度也就失去意義了。
激光雷達的機遇和挑戰(zhàn)
機遇
激光雷達在智能機器生態(tài)系統(tǒng)中有很多機遇。與使用二維圖像相比,點云能夠更容易的被計算機使用,用于構(gòu)建物理環(huán)境的三維形象——二維圖像是人腦最容易理解的數(shù)據(jù),而對于計算機來說,點云是最容易理解的。
二維激光雷達掃描器可在戶外使用,并專為移動、低功耗應用而設計。它只用了競爭對手近四分之一的成本,這將給這類傳感器帶來全新的應用(我們在很多其他類型的傳感器中已經(jīng)看到過這樣的現(xiàn)象)。 二維激光雷達也可以被搭載到另一個旋轉(zhuǎn)的元件上以產(chǎn)生環(huán)境中完整的三維點云。

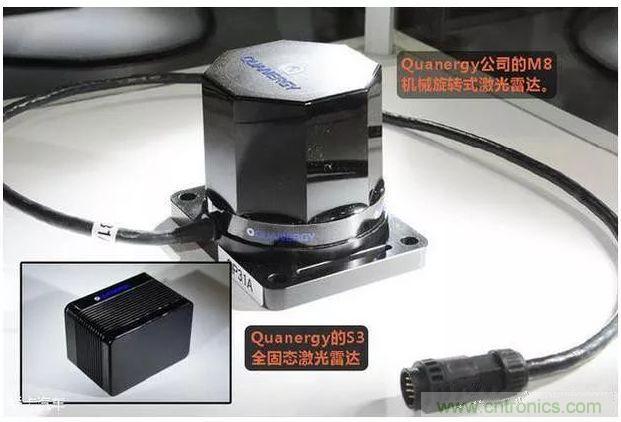
其他公司正在尋求降低系統(tǒng)成本的其他策略,例如Quanergy的固態(tài)激光雷達。該系統(tǒng)大體與上文已介紹的系統(tǒng)相同,然而,與使用旋轉(zhuǎn)光學器件來移動光束不同的是,它們使用 “相控陣列光學系統(tǒng)”來引導激光脈沖的方向,它可以在某一方向上釋放一個激光脈沖,而讓下一個脈沖(1微秒之后)瞄準視野中的其它地方。
它能夠?qū)崟r關(guān)注視野范圍內(nèi)看似移動的物體,這是對人類駕駛員的模仿——后者能及時注意到即將進入汽車所行駛的道路的障礙物。Quanergy系統(tǒng)被設計為能在沒有機械移動的情況下做到這一點,并且每秒采樣大約100萬個數(shù)據(jù)點——這與64線旋轉(zhuǎn)激光雷達的速度相當,卻能顯著降低成本。它另一個優(yōu)勢是更容易被集成在反光鏡和保險杠等其他汽車部件上。
另外,更大和功率更高的系統(tǒng)也正在開發(fā)中,它可以從在3萬英尺高度飛行的飛機上對地面成像,其分辨率足以能夠看到地面上的車輛。雖然這些系統(tǒng)的市場需求更小,且成本更高,但其發(fā)展將繼續(xù)降低傳感器技術(shù)的整體成本。
挑戰(zhàn)
1、材質(zhì)
由于激光雷達基于對激光脈沖返回傳感器所需時間的測量,因此高反射率的表面會帶來問題。大多數(shù)材料從微觀水平上看表面粗糙,并且向所有方向散射光;這類散射光的一小部分返回到傳感器,并且足以產(chǎn)生距離數(shù)據(jù)。然而,如果表面反射率非常高,光就會向遠離傳感器的方向散射,那么這一區(qū)域的點云就會不完整。
2、環(huán)境
空氣中的環(huán)境也可以對激光雷達讀數(shù)造成影響。記錄顯示,大霧和大雨會減弱發(fā)射的激光脈沖而對激光雷達造成影響。為了解決這些問題,較大功率的激光器投入使用,但它對于較小的、移動或?qū)β拭舾械膽脕碚f并不是一個好的解決方案。
3、行駛速度
激光雷達系統(tǒng)面臨的另一個挑戰(zhàn)是旋轉(zhuǎn)時的刷新率相對較慢。系統(tǒng)的刷新速率受復雜的光學器件旋轉(zhuǎn)速度的限制。激光雷達系統(tǒng)最快的旋轉(zhuǎn)速率大約是10Hz,這限制了數(shù)據(jù)流的刷新速率。當傳感器旋轉(zhuǎn)時,以60英里/小時行駛的汽車在1/10秒內(nèi)行進8.8英尺,因此傳感器對于在汽車駛過期間在這8.8英尺內(nèi)發(fā)生的變化基本上是看不清的。更重要的是,激光雷達覆蓋的范圍(在完美條件下)為100-120米,這對于以60英里/小時行駛的汽車來說僅相當于不到4.5秒的行駛時間。
4、成本
也許對于激光雷達來說,高昂的設備成本是它需要克服的最大挑戰(zhàn)。盡管自該技術(shù)得到應用以來其成本已大幅降低,但仍然是它被大范圍采用的一個重要障礙。對于主流汽車工業(yè)來說,一個價值2萬美元的傳感器將無法被市場接受。伊隆·馬斯克說:“我不認為它對于汽車的發(fā)展是有意義的,我認為它不是必須的。”
5、屬性識別
雖然我們將激光雷達視為計算機視覺的一個組件,但點云卻是完全基于幾何呈現(xiàn)的。相反,人眼除了形狀之外還能識別物體的其他物理屬性,比如顏色和紋理?,F(xiàn)在的激光雷達系統(tǒng)不能區(qū)分紙袋和巖石之間的差別,而這本應是傳感器理解和試圖避開障礙物時考慮的因素。
6、黑客攻擊
激光雷達發(fā)出去的激光本身是沒有編碼的。所以接收器自己本身是沒辦法識別到底這束光線是它隔壁發(fā)射器發(fā)射出去的還是干擾信號。黑客攻擊指的是采取模擬車輛、行人的信號,反饋給激光雷達造成周圍存在障礙物假象的攻擊手法。最終會導致汽車被強制減速或者剎車。
對激光雷達廠商而言,可以從兩個角度去抵御黑客的攻擊:如提高激光發(fā)射頻率,高速激光發(fā)射頻率在幾個微秒,黑客的模擬信號就很難選擇什么時候去發(fā)射干擾信號為接收器接收。另外,通過算法做一些錯誤判斷,參考之前幾頻數(shù)據(jù)過濾掉干擾數(shù)據(jù)。

激光雷達只是用于給計算機提供物理環(huán)境數(shù)據(jù)的眾多傳感器之一,但是生成的數(shù)據(jù)是計算機最容易理解的,并且它也將變得更便宜。Velodyne銷售和市場總監(jiān)Wolfgang Juchmann稱,激光雷達的成本在過去7年里下降了10倍。 得益于成本的降低,我們將不斷看到新的潛在應用領域。
本文轉(zhuǎn)載自傳感器技術(shù)。
推薦閱讀:



