

【導(dǎo)讀】?jī)H僅通過多次使用相同種類的傳感器無法克服每種傳感器的缺點(diǎn)。反之,我們需要將來自不同種類傳感器的信息組合在一起。工作在可見光譜范圍內(nèi)的攝像頭CMOS芯片在濃霧、下雨、刺眼陽(yáng)光和光照不足的情況下會(huì)遇到麻煩。而雷達(dá)缺少目前成像傳感器所具有的高分辨率。我們可以在每種傳感器中找到諸如此類的優(yōu)缺點(diǎn)。
現(xiàn)在路面上的很多汽車,甚至是展廳內(nèi)的很多新車,內(nèi)部都配備有基于攝像頭、雷達(dá)、超聲波或LIDAR等不同傳感器的先進(jìn)駕駛員輔助系統(tǒng)(ADAS)。
這些系統(tǒng)的數(shù)量將會(huì)隨著新法案的通過而不斷增加,例如在美國(guó),就有強(qiáng)制要求安裝后視攝像頭的法案。此外,諸如車險(xiǎn)打折優(yōu)惠和美國(guó)公路交通安全管理局(NHTSA)、歐洲新車安全評(píng)鑒協(xié)會(huì)(Euro-NCAP)等機(jī)構(gòu)做出的汽車安全評(píng)級(jí)正在使某些系統(tǒng)成為汽車的強(qiáng)制功能;另一方面,這也助長(zhǎng)了消費(fèi)者對(duì)它們的需求。
諸如自動(dòng)泊車、公路巡航控制和自動(dòng)緊急制動(dòng)的自動(dòng)駕駛汽車功能也在很大程度上依靠傳感器來實(shí)現(xiàn)。重要的不僅僅是傳感器的數(shù)量或種類,它們的使用方式也同樣重要。目前,大多數(shù)路面上行駛車輛內(nèi)的ADAS都是獨(dú)立工作的,這意味著它們彼此之間幾乎不交換信息。(沒錯(cuò),某些高端車輛具有非常先進(jìn)的自動(dòng)駕駛功能,不過這些功能還未普及)。后視攝像頭、環(huán)視系統(tǒng)、雷達(dá)和前方攝像頭都有它們各自的用途。通過將這些獨(dú)立的系統(tǒng)添加到車輛當(dāng)中,可以為駕駛員提供更多信息,并且實(shí)現(xiàn)自動(dòng)駕駛功能。不過,你還可以突破限制,實(shí)現(xiàn)更多功能——參見圖1。
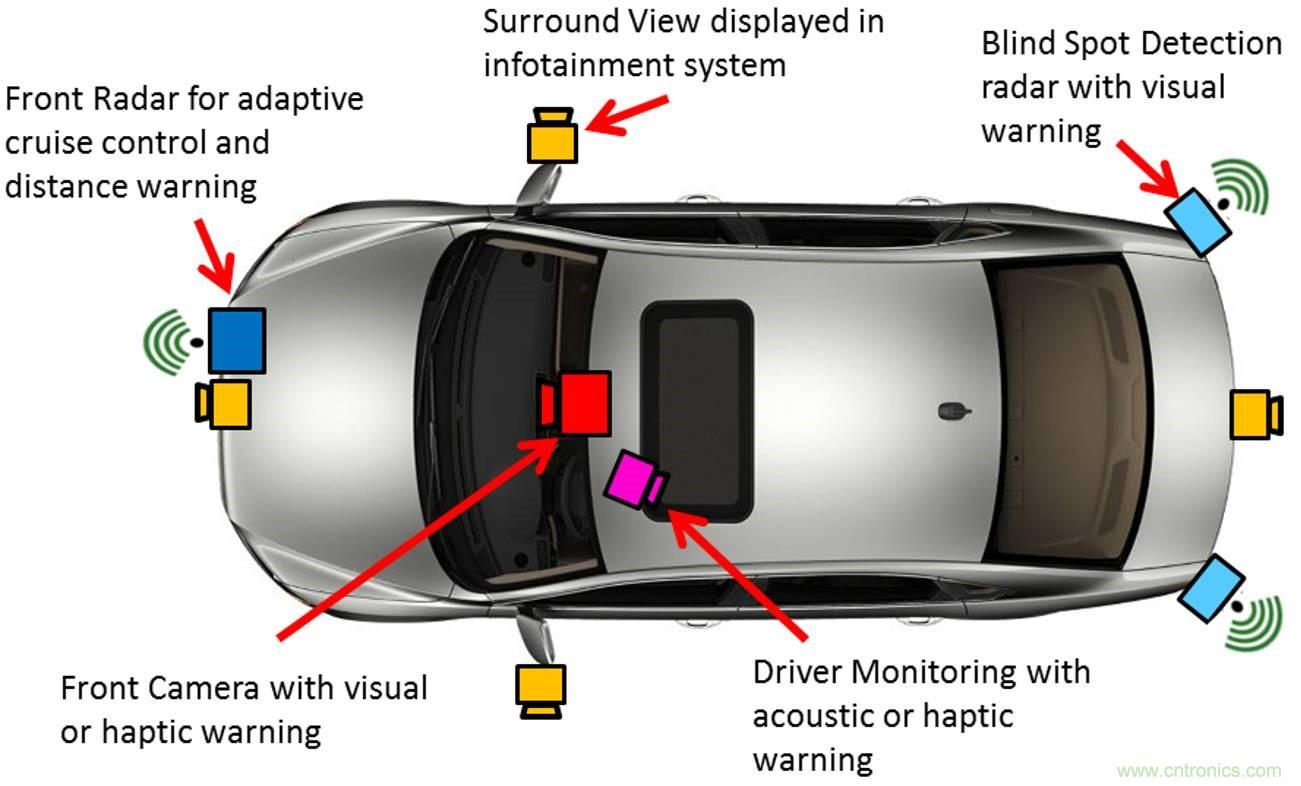
圖1:ADAS以汽車內(nèi)單個(gè)、獨(dú)立的功能存在。
傳感器融合
僅僅通過多次使用相同種類的傳感器無法克服每種傳感器的缺點(diǎn)。反之,我們需要將來自不同種類傳感器的信息組合在一起。工作在可見光譜范圍內(nèi)的攝像頭CMOS芯片在濃霧、下雨、刺眼陽(yáng)光和光照不足的情況下會(huì)遇到麻煩。而雷達(dá)缺少目前成像傳感器所具有的高分辨率。我們可以在每種傳感器中找到諸如此類的優(yōu)缺點(diǎn)。
傳感器融合這一想法的偉大之處在于獲得不同傳感器和傳感器種類的輸入內(nèi)容,并且使用組合在一起的信息來更加準(zhǔn)確地感知周圍的環(huán)境。相對(duì)于獨(dú)立系統(tǒng),這樣可以做出更好、更安全的決策。雷達(dá)也許不具有光傳感器所具有的分辨率,不過它在測(cè)距和穿透雨、雪和濃霧方面具有很大優(yōu)勢(shì)。這些天氣條件或光照不足的惡劣情況不利于攝像頭發(fā)揮作用,不過攝像頭能夠分辨顏色(可以想一想街道指示牌和路標(biāo)),并且具有很高的分辨率。目前路面上圖像傳感器的分辨率已經(jīng)達(dá)到1百萬(wàn)像素。在未來幾年內(nèi),圖像傳感器的發(fā)展趨勢(shì)將是2百萬(wàn),甚至4百萬(wàn)像素。
雷達(dá)和攝像頭是兩項(xiàng)傳感器技術(shù)完美融合、互為補(bǔ)充的典范。采用這種方法的融合系統(tǒng)所實(shí)現(xiàn)的功能要遠(yuǎn)超這些獨(dú)立系統(tǒng)能夠?qū)崿F(xiàn)的功能總和。使用不同的傳感器種類可以在某一種傳感器全都出現(xiàn)故障的環(huán)境條件下,額外提供一定冗余度。這種錯(cuò)誤或故障可能是由自然原因(諸如一團(tuán)濃霧)或是人為現(xiàn)象(例如對(duì)攝像頭或雷達(dá)的電子干擾或人為干擾)導(dǎo)致。即使是在一個(gè)傳感器失效的情況下,這樣的傳感器融合系統(tǒng)也可以保持某些基本或緊急的功能。完全借助報(bào)警功能,或者讓駕駛員時(shí)刻做好準(zhǔn)備,從而接管對(duì)車輛的控制,系統(tǒng)故障也許就不那么嚴(yán)重了。然而,高度和完全自動(dòng)駕駛功能必須提供充足的時(shí)間讓駕駛員重新獲得對(duì)車輛的控制。在這段駕駛員接管車輛控制之前的時(shí)間范圍內(nèi),控制系統(tǒng)需要保持對(duì)車輛最低限度的控制。
傳感器融合系統(tǒng)示例
傳感器融合的復(fù)雜程度有所不同,并且數(shù)據(jù)的類型也不一樣。兩個(gè)基本的傳感器融合示例是:a)后視攝像頭加上超聲波測(cè)距;b)前方攝像頭加上多模式前置雷達(dá)——參見圖2?,F(xiàn)在,我們可以通過對(duì)現(xiàn)有系統(tǒng)進(jìn)行輕微更改和/或通過增加一個(gè)單獨(dú)的傳感器融合控制單元來對(duì)其進(jìn)行實(shí)現(xiàn)。
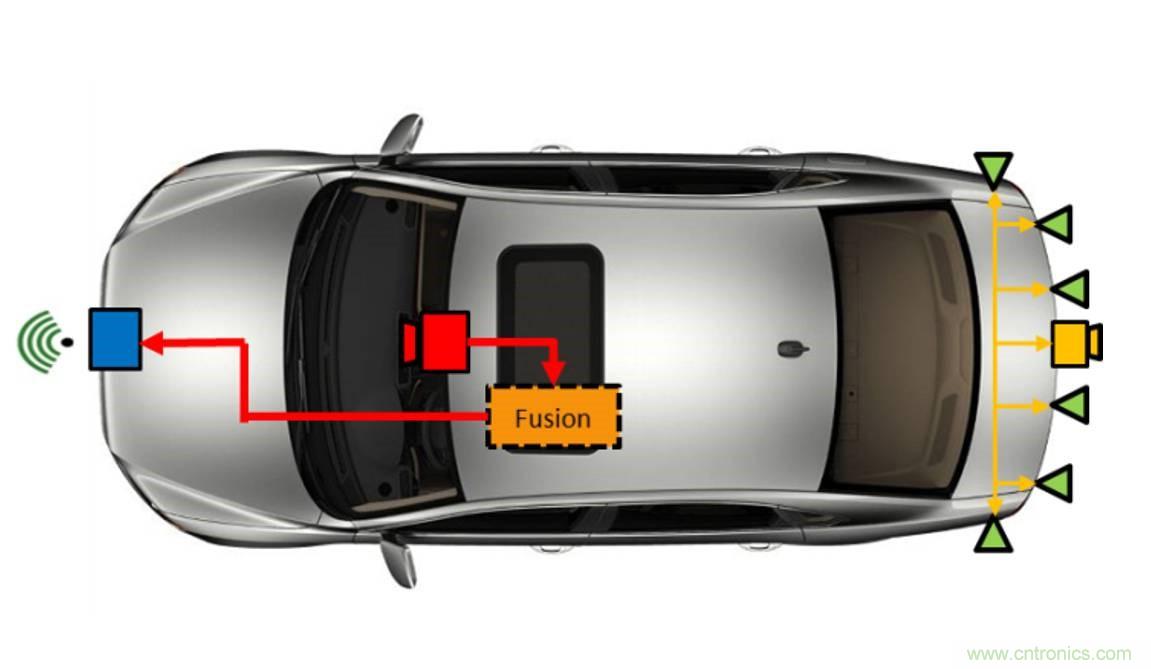
圖2:將前方雷達(dá)與前方攝像頭融合在一起,以實(shí)現(xiàn)自適應(yīng)巡航控制加車道保持輔助,或者將后視攝像頭與超聲波測(cè)距報(bào)警組合在一起來實(shí)現(xiàn)自動(dòng)泊車。
• 后視攝像頭+超聲波測(cè)距
超聲波泊車輔助技術(shù)在汽車市場(chǎng)內(nèi)被廣泛接受,并且已十分成熟;這項(xiàng)技術(shù)在泊車時(shí)能對(duì)鄰近物體給出聽得見或看得見的報(bào)警。正如之前提到的那樣,到2018年,美國(guó)所有新出廠的車輛都必須安裝后視攝像頭。將來自二者的信息結(jié)合在一起,才能實(shí)現(xiàn)先進(jìn)的泊車輔助功能,而其靠單一系統(tǒng)是無法實(shí)現(xiàn)的。后視攝像頭使駕駛員能很清楚地看到車輛后方的情況,而機(jī)器視覺算法可以探測(cè)物體,以及路肩石和街道上的標(biāo)記。通過超聲波提供的補(bǔ)充功能,可以準(zhǔn)確確定識(shí)別物體的距離,并且在低光照或完全黑暗的情況下,也能確保基本的接近報(bào)警。
• 前視攝像頭+多模前置雷達(dá)
另一種強(qiáng)大的組合是將前視攝像頭的功能與前置雷達(dá)組合在一起。前置雷達(dá)能夠在任何天氣條件下測(cè)量高達(dá)150米的物體的速度和距離。攝像頭在探測(cè)和區(qū)分物體方面(包括讀取街道指示牌和路標(biāo))十分出色。通過使用具有不同視場(chǎng)角(FoV)和不同光學(xué)元件的多個(gè)攝像頭傳感器,系統(tǒng)可以識(shí)別車前通過的行人和自行車,以及150米甚至更遠(yuǎn)范圍內(nèi)的物體,同時(shí),其還可以可靠實(shí)現(xiàn)自動(dòng)緊急制動(dòng)和城市啟停巡航控制等功能。
許多情況下,在特定的已知外部條件下,僅通過一種傳感器或單個(gè)系統(tǒng),就能夠執(zhí)行ADAS功能。然而,考慮到路面上有很多不可預(yù)計(jì)的情況,這還不足實(shí)現(xiàn)可靠運(yùn)行。傳感器融合除了能實(shí)現(xiàn)更復(fù)雜和自主的功能外,還可以在現(xiàn)有功能中實(shí)現(xiàn)更少的誤報(bào)和漏報(bào)。說服消費(fèi)者和立法者,使他們相信汽車可以由“一臺(tái)機(jī)器”自主駕駛,將會(huì)十分關(guān)鍵。
傳感器融合系統(tǒng)分割
與汽車內(nèi)每個(gè)系統(tǒng)單獨(dú)執(zhí)行各自的報(bào)警或控制功能不同,在一個(gè)融合系統(tǒng)中,最終采取哪種操作是由單個(gè)器件集中決定的?,F(xiàn)在的關(guān)鍵問題就是在哪里完成數(shù)據(jù)處理,以及如何將傳感器的數(shù)據(jù)發(fā)送到中央電子控制單元(ECU)。當(dāng)對(duì)不是集中在一起而是遍布車身的多個(gè)傳感器進(jìn)行融合時(shí),我們就需要專門考慮傳感器和中央融合ECU之間的連接和電纜。對(duì)于數(shù)據(jù)處理的位置也是如此,因?yàn)樗矔?huì)影響整個(gè)系統(tǒng)的實(shí)現(xiàn)。讓我們來看一看可能的系統(tǒng)分割中的兩種極端情況。
集中式處理
集中式處理的極端情況是,所有的數(shù)據(jù)處理和決策制定都是在同一個(gè)位置完成,數(shù)據(jù)是來自不同傳感器的“原始數(shù)據(jù)”——請(qǐng)見圖3。
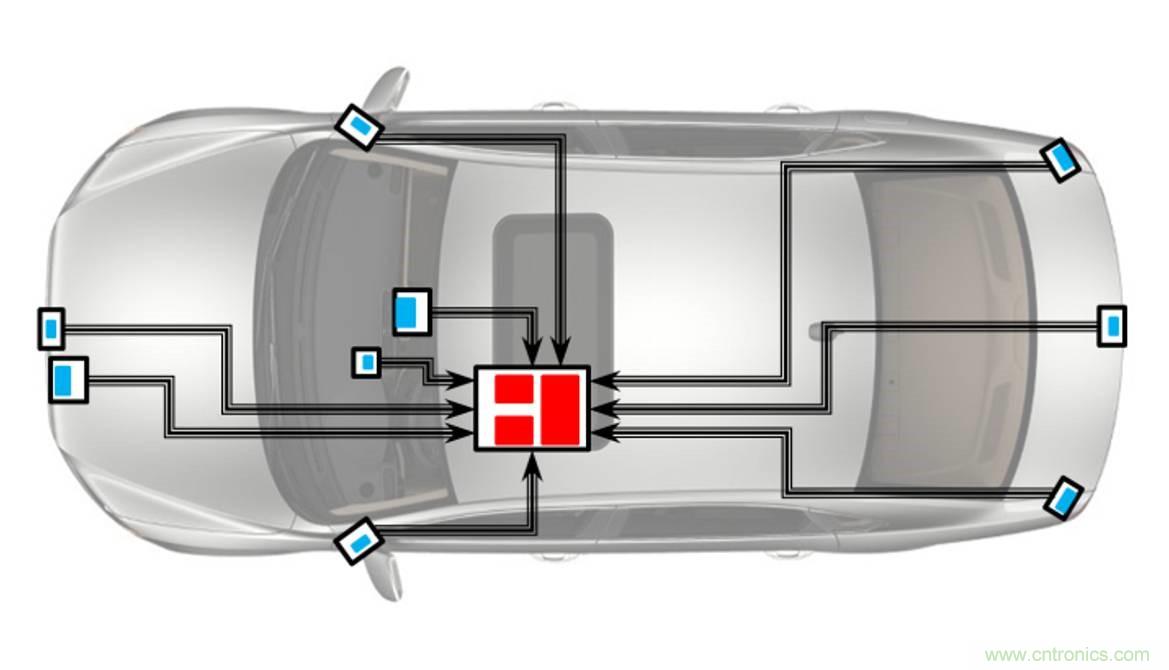
圖3:具有“傳統(tǒng)”衛(wèi)星式傳感器模塊的集中處理。
優(yōu)點(diǎn):
傳感器模塊——傳感器模塊體積小巧,成本低,功耗也低,這是因?yàn)槠渲恍枰獔?zhí)行檢測(cè)和數(shù)據(jù)傳輸任務(wù)。傳感器的安裝位置也很靈活,并且所需安裝空間很小。替換成本低。通常情況下,由于無需處理或做決策,傳感器模塊具有較低的功能安全要求。
處理ECU——中央處理ECU可以獲取全部數(shù)據(jù),這是因?yàn)閿?shù)據(jù)不會(huì)因?yàn)閭鞲衅髂K內(nèi)的預(yù)處理或壓縮而丟失。由于傳感器成本較低,并且外形尺寸較小,因此可以部署更多的傳感器。
缺點(diǎn):
傳感器模塊——實(shí)時(shí)處理傳感器數(shù)據(jù)需要提供寬帶通信(高達(dá)數(shù)Gb/s),因此可能出現(xiàn)較高電磁干擾(EMI)。
處理ECU——中央ECU需要有高處理能力和速度來處理所有輸入數(shù)據(jù)。對(duì)于很多高帶寬I/O和高端應(yīng)用處理器來說,這意味著更高的電能需求和更大的散熱量。傳感器數(shù)量增加將大幅增加對(duì)中央ECU性能的需要。通過使用FPD-Link III等接口,在一根同軸電纜上傳送傳感器及功耗、控制和配置等多種數(shù)據(jù)(雙向反向通道),有些缺點(diǎn)可以被克服。這樣便可極大降低系統(tǒng)的接線要求。
全分布式系統(tǒng)
另一種截然不同的極端情況是全分布式系統(tǒng)。這種情況是由本地傳感器模塊進(jìn)行高級(jí)數(shù)據(jù)處理,并在一定程度上進(jìn)行決策制定的。全分布式系統(tǒng)只將對(duì)象數(shù)據(jù)或元數(shù)據(jù)(描述對(duì)象特征和/或識(shí)別對(duì)象的數(shù)據(jù))發(fā)回到中央融合ECU。ECU將數(shù)據(jù)組合在一起,并最終決定如何執(zhí)行或做出反應(yīng)——請(qǐng)見圖4。
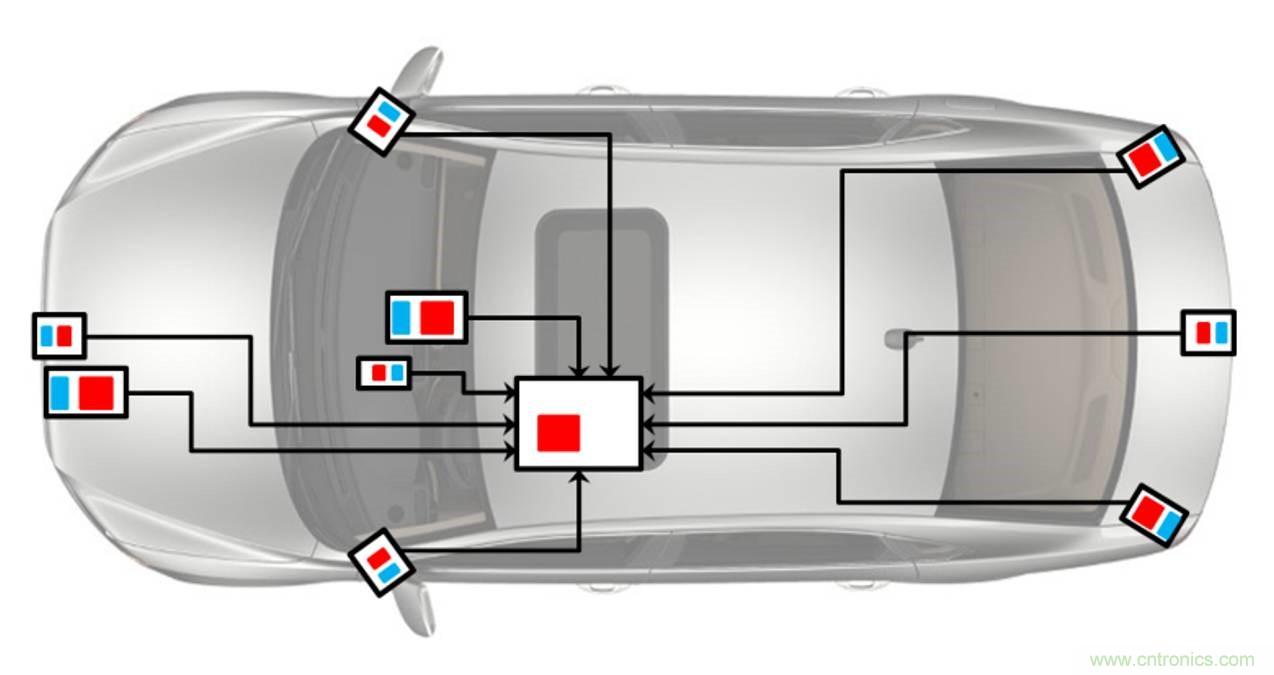
圖4:傳感器數(shù)據(jù)由傳感器模塊處理、決策由中央ECU制定的分布式系統(tǒng)。
全分布式系統(tǒng)既有優(yōu)點(diǎn)又有缺點(diǎn)。
優(yōu)點(diǎn):
傳感器模塊——傳感器模塊與中央ECU之間可以使用更低帶寬、更加簡(jiǎn)單且更加便宜的接口。在很多情況下,小于1Mb/s的CAN總線就足夠用了。
處理ECU——中央ECU只將對(duì)象數(shù)據(jù)融合在一起,因此其所需處理能力更低。對(duì)于某些系統(tǒng)來說,用一個(gè)高級(jí)的安全微控制器就足夠了。模塊更小,所需功耗也就更低。由于很多處理都是在傳感器內(nèi)部完成的,傳感器數(shù)量增加不會(huì)大幅增加對(duì)中央ECU的性能需求。
缺點(diǎn):
傳感器模塊——傳感器模塊需要有應(yīng)用處理器,這樣的話就會(huì)變得體積更大、價(jià)格更高且功耗更大。由于本地處理和決策制定,傳感器模塊的功能安全要求也就更高。當(dāng)然,增加更多的傳感器,成本也會(huì)大幅上升。
處理ECU——中央決策制定ECU只能獲取對(duì)象數(shù)據(jù),而無法訪問實(shí)際的傳感器數(shù)據(jù)。因此,想要“放大”感興趣的區(qū)域很難實(shí)現(xiàn)。
尋找黃金分割
根據(jù)系統(tǒng)中所使用傳感器的數(shù)量與種類,以及針對(duì)不同車型和升級(jí)選項(xiàng)的可擴(kuò)展性要求,將兩個(gè)拓?fù)浠旌显谝黄鹁涂色@得一個(gè)優(yōu)化解決方案。目前很多融合系統(tǒng)使用帶本地處理的傳感器用于雷達(dá)和激光雷達(dá)(LIDAR),使用前置攝像頭用于機(jī)器視覺。一個(gè)全分布式系統(tǒng)可以使用現(xiàn)有的傳感器模塊與對(duì)象數(shù)據(jù)融合ECU組合在一起。諸如環(huán)視和后視攝像頭的系統(tǒng)中的“傳統(tǒng)”傳感器模塊可以讓駕駛員看到周圍的環(huán)境情況——請(qǐng)見圖5。可以將更多的ADAS功能集成進(jìn)駕駛員監(jiān)測(cè)或攝像頭監(jiān)控系統(tǒng)等融合系統(tǒng)中,但是傳感器融合的原理還是一樣。
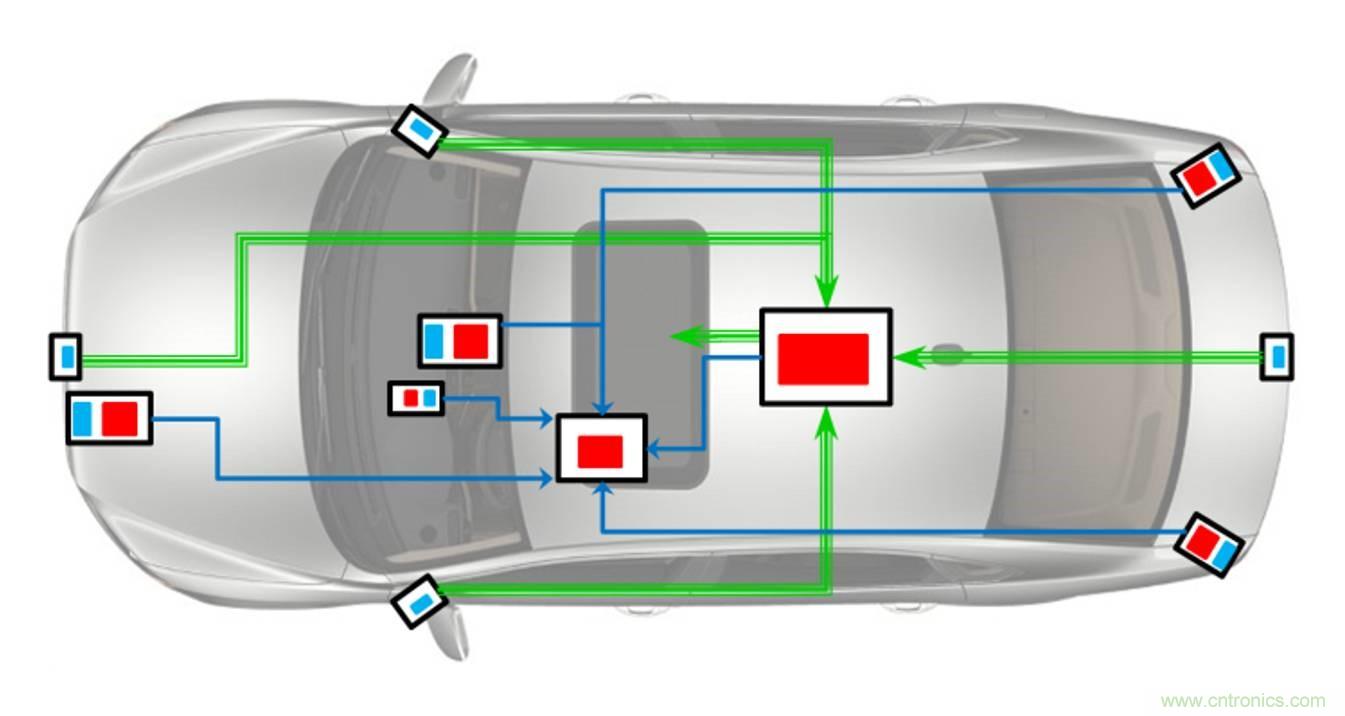
圖5:尋找分布式和集中式處理的完美結(jié)合。
平臺(tái)管理、目標(biāo)汽車細(xì)分、靈活性和可擴(kuò)展性是重要的經(jīng)濟(jì)因素;這些因素也在分割和設(shè)計(jì)融合系統(tǒng)時(shí)發(fā)揮著重要作用。對(duì)于任一特定情況,所得系統(tǒng)也許不是最佳設(shè)計(jì)方案,但是從平臺(tái)和車隊(duì)的角度看,它卻可能是最佳方案。
誰(shuí)是所有這些傳感器數(shù)據(jù)的“觀看者”?
關(guān)于ADAS,我們還有兩個(gè)方面沒有討論到:信息ADAS對(duì)功能ADAS。前者就是當(dāng)駕駛員仍然對(duì)汽車完全掌控時(shí),擴(kuò)大和延伸駕駛員的感官范圍(例如環(huán)視和夜視)。第二個(gè)是機(jī)器視覺,它使汽車能夠感知周圍環(huán)境,并做出自我決策以及執(zhí)行(自動(dòng)緊急制動(dòng)、車道保持輔助)。傳感器融合自然而然地將這兩個(gè)世界合而為一。
正因如此,我們才有可能將同一傳感器應(yīng)用于不同用途,不過這么做的代價(jià)就是在選擇最佳模塊間通信和處理位置方面受到了限制。以環(huán)視為例,這項(xiàng)功能最初的設(shè)計(jì)目的是,通過將視頻傳入到中央顯示屏上,為駕駛員提供360度視場(chǎng)角。為什么不使用同樣的攝像頭,并將機(jī)器視覺應(yīng)用到其上呢?后視攝像頭可用于實(shí)現(xiàn)倒車保護(hù)或自動(dòng)停車,而側(cè)視攝像頭可用于實(shí)現(xiàn)盲點(diǎn)檢測(cè)/報(bào)警,也包括自動(dòng)泊車。
單獨(dú)使用的機(jī)器視覺在傳感器模塊內(nèi)進(jìn)行本地處理,然后通過CAN總線等簡(jiǎn)單的低帶寬連接將對(duì)象數(shù)據(jù)甚至是命令傳送出去。然而,這種連接不足以傳送完整的視頻流。視頻壓縮當(dāng)然可以降低所需帶寬,但是還不足以將所需帶寬降到百兆位范圍內(nèi),并且它本身也存在一些問題。隨著高動(dòng)態(tài)范圍(HDR)分辨率、幀速率和曝光數(shù)增加,這變得更加困難。高帶寬連接和攝像頭模塊不參與數(shù)據(jù)處理解決了視頻的問題,但是現(xiàn)在需要將處理添加到中央ECU,以便在其中運(yùn)行機(jī)器視覺。缺少中央處理能力或散熱控制會(huì)成為這種解決方案的瓶頸。
雖然在傳感器模塊中進(jìn)行處理并同時(shí)使用高帶寬通信在技術(shù)上并不是不可實(shí)現(xiàn),但從總體系統(tǒng)成本、功耗和安裝空間角度來講并不十分有利。
傳感器融合配置的可靠運(yùn)行
由于很多融合系統(tǒng)能夠在沒有駕駛員的情況下執(zhí)行特定汽車功能(例如轉(zhuǎn)向、制動(dòng)和加速)的自主控制,我們需要對(duì)功能安全進(jìn)行認(rèn)真考慮,以確保在不同條件下和汽車的使用壽命內(nèi)系統(tǒng)能夠安全和可靠運(yùn)行。一旦做出決策,并隨后采取自主操作,那么對(duì)于功能安全的要求將會(huì)大幅提升。
若采用分布式的方法,每個(gè)處理關(guān)鍵數(shù)據(jù)或制定決策的模塊必須符合那些增加的標(biāo)準(zhǔn)。與只搜集和發(fā)送傳感器信息的模塊相比,這會(huì)增加物料清單(BOM)成本、尺寸、功耗和軟件。在安裝空間不足的環(huán)境中,器件很難冷卻,并且其損壞的風(fēng)險(xiǎn)和所需的更換也很高(一次簡(jiǎn)單的小事故有可能需要更換保險(xiǎn)杠和所有相連的傳感器),這可能抵消具有多個(gè)傳感器模塊的分布式系統(tǒng)的優(yōu)勢(shì)。
如果采用“傳統(tǒng)”傳感器模塊,則需進(jìn)行自檢和故障報(bào)告,以實(shí)現(xiàn)整個(gè)系統(tǒng)的安全運(yùn)轉(zhuǎn),但是其還未達(dá)到智能傳感器模塊的程度。
結(jié)論
雖然純粹的駕駛員信息系統(tǒng)可以在它們的功能受到損害時(shí)關(guān)閉并將其通報(bào)給駕駛員,但是高度自主駕駛功能就沒有那么自由了。想象一下一輛汽車正在執(zhí)行緊急制動(dòng)操作,然后又突然解除并松開制動(dòng)器的情況。或者說,汽車在公路上行駛時(shí),整個(gè)系統(tǒng)關(guān)閉,而此時(shí)駕駛員正在汽車“全自動(dòng)駕駛”狀態(tài)下呼呼大睡(未來可能的一個(gè)場(chǎng)景)。在駕駛員能夠安全控制車輛之前,系統(tǒng)需要繼續(xù)保持工作一段時(shí)間,而這至少需要有幾秒到半分鐘。系統(tǒng)必須運(yùn)行到何種程度,以及如何確保在故障情況下運(yùn)轉(zhuǎn),這些問題在業(yè)內(nèi)似乎還未達(dá)成明確共識(shí)。具有自動(dòng)駕駛功能的飛機(jī)通常情況下使用冗余系統(tǒng)。雖然我們一般情況下認(rèn)為它們是安全的,不過它們?cè)靸r(jià)昂貴并且占用大量空間。
傳感器融合將會(huì)是邁向自動(dòng)駕駛及享受旅途時(shí)光和駕駛樂趣的關(guān)鍵一步。
(作者簡(jiǎn)介:Hannes Estl,德州儀器(TI)汽車ADAS部門的總經(jīng)理)
本文來源于電子技術(shù)設(shè)計(jì)。
推薦閱讀:



