

【導(dǎo)讀】在任何數(shù)控電機驅(qū)動器中,一個不可或缺的部件是相電流 反饋。測量質(zhì)量與扭矩紋波和扭矩建立時間等系統(tǒng)參數(shù)直 接相關(guān)。雖然系統(tǒng)性能與相電流測量之間存在強相關(guān)關(guān) 系,但很難將其轉(zhuǎn)換成對反饋系統(tǒng)的硬性要求。從系統(tǒng)角 度來看,本文將討論如何設(shè)計出面向電機控制優(yōu)化的反饋 系統(tǒng)。同時還將指出誤差源,并討論緩解效應(yīng)。
1. 簡介
電流環(huán)路在電機驅(qū)動器或伺服(見圖1)中的性能直接影響電機的 扭矩輸出(扭矩輸出對平滑響應(yīng)至關(guān)重要)以及精確定位和速度曲 線。平穩(wěn)扭矩輸出的一個關(guān)鍵衡量指標(biāo)是扭矩紋波。這對仿形 切削和切割應(yīng)用尤為重要,在此類應(yīng)用中,扭矩紋波會直接轉(zhuǎn) 化為可實現(xiàn)的終端應(yīng)用精度。對于生產(chǎn)效率直接受可用控制帶 寬影響的自動化應(yīng)用,響應(yīng)時間和建立時間等與電流環(huán)路動態(tài) 相關(guān)的參數(shù)非常重要。除電機設(shè)計本身外,驅(qū)動器內(nèi)的多個因 素也會直接影響這些性能參數(shù)。
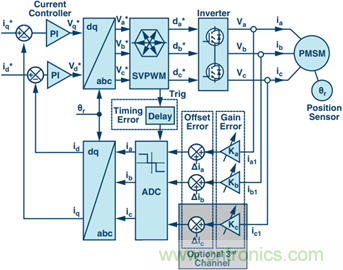
圖1. 反饋路徑中具有非理想元件的電機驅(qū)動器中的電流環(huán)路。
一個電機驅(qū)動器內(nèi)部有多個扭矩紋波來源。一些源于電機本 身,例如由定子繞組和定子槽布置以及轉(zhuǎn)子EMF諧波引起的齒 槽扭矩。1 其他扭矩紋波來源與相電流反饋系統(tǒng)2中的失調(diào)和增益 誤差相關(guān)(見圖1)。
逆變器死區(qū)時間也會直接影響扭矩紋波,因為它會將定子電頻 率的低頻(主要是5次和7次)3諧波分量添加至PWM輸出電壓。這 種情況下,對電流環(huán)路的影響與電流環(huán)路在諧波頻率上的抗干 擾能力相關(guān)。
本文將重點關(guān)注相電流測量引起的扭矩紋波。我們將對每種誤 差進行分析,并討論最大限度地減小測量誤差影響的方法。
2. 電流測量誤差引起的扭矩紋波
3相永磁電機的電磁扭矩公式為:

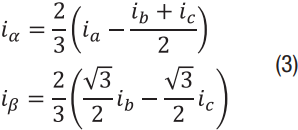
Te為電磁扭矩,PP 為極點對數(shù), λPM為永磁磁通量, Ld 和 Lq為同 步旋轉(zhuǎn)參考系中的定子電感,id 和iq 為同步旋轉(zhuǎn)參考系中的定子 電流。在穩(wěn)態(tài)和理想條件下,id 和iq 是直流量,因此,產(chǎn)生的扭 矩也是直流量。 id 或iq中存在交流分量時,將出現(xiàn)扭矩紋波。由 于idq和產(chǎn)生的扭矩之間有直接關(guān)系,因此本文采用的方法是分 析各種測量誤差如何影響id和iq。此分析以3相電機的電流反饋 為基礎(chǔ):
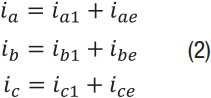
其中,ix為測得的相電流(x = a、b、c),ix1為實際相電流,ixe為測量誤差。未對誤差屬性作出任何假設(shè);可以是失調(diào)、增益誤差或交流分量。采用Clarke變換時,電流投影到靜止2相量 iα 和iβ上:
采用Park變換時,電流投影到旋轉(zhuǎn)2相量id和iq上:
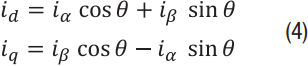
其中, θ為轉(zhuǎn)子的角度。對于3相電機的磁場定向控制,需要知道所有三相電流。一種常用方法是測量所有三相電流,這需要三個傳感器和三條反饋通道。其他常用方法是僅測量兩條通道,然后計算第三相電流。出于成本和復(fù)雜性原因,傳感器數(shù)和測量通道數(shù)越少越好,但后續(xù)部分將提到,測量所有三相電流可使系統(tǒng)更加穩(wěn)定地應(yīng)對測量誤差。
2.1 兩相測量
首先考慮測量兩相電流的3相驅(qū)動器。第三相電流在電流總和為0的假設(shè)下進行計算。如果測得ia和ib,則ic的計算公式為:
利用公式(2)和公式(5):
在靜止參考系中,電流為:
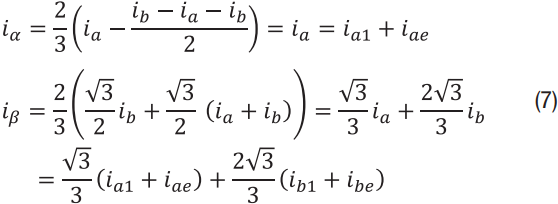
在旋轉(zhuǎn)參考系中,電流為:
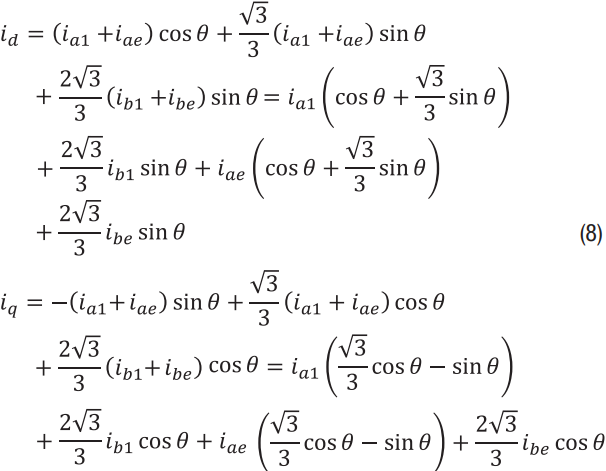
注意,id和iq都有一個與實際相位電流相關(guān)的項和一個與測量誤差相關(guān)的項(idq = idq1+ idqe)。對于此分析,誤差項ide和iqe最為重要。
2.2 三相測量
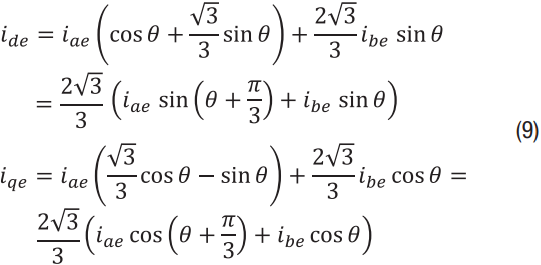
現(xiàn)在考慮測量所有三相電流的3相驅(qū)動器。按照兩條通道時采用的步驟,得出靜止量和旋轉(zhuǎn)量:
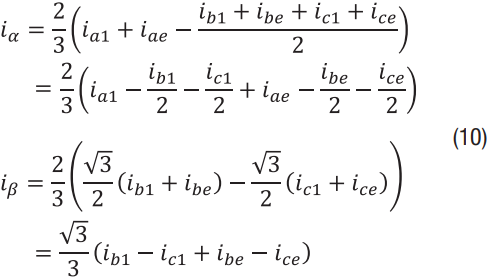
在旋轉(zhuǎn)參考系中:
同樣,上述公式有一個與實際相位電流相關(guān)的項(idq1)和一個與測量誤差相關(guān)的項(idqe)。誤差項ide和iqe為:
3. 錯誤采樣時刻
當(dāng)三相電機由開關(guān)電壓源逆變器供電時,相位電流可以看作由兩個分量組成:基波分量和開關(guān)分量(見圖2A)。

圖2. (A) 由開關(guān)電壓源逆變器驅(qū)動的3相電機的相位電流。(B) 描述電流紋波如何通過采樣衰減的放大版相位電流。
出于控制目的,必須消除開關(guān)分量,否則會影響電流控制環(huán)路的性能。提取平均分量的常用方法是對與PWM周期同步的電流進行采樣。在PWM周期的開始和中間部分,電流取平均值,如果采樣與這些實例緊密同步,則可有效抑制開關(guān)分量,如圖2B所示。但是,如果對電流進行采樣時存在時序誤差,則將出現(xiàn)混疊,從而導(dǎo)致電流環(huán)路的性能下降。本部分討論時序誤差的成因、對電流環(huán)路的影響,以及如何使系統(tǒng)的穩(wěn)定性能夠應(yīng)對采樣時序誤差。
3.1 電機驅(qū)動器中的采樣時序誤差
相位電流的基波分量通常在數(shù)十Hz范圍內(nèi),電流環(huán)路的帶寬通常在數(shù)kHz范圍內(nèi),而很小的時序誤差也可能影響控制性能,這似乎違反常理。然而,由于限制di/dt的只有相電感,即使很小的時序誤差也可能導(dǎo)致顯著的電流失真。例如,在5 mH電感兩端 持續(xù)1 μs的250 V電壓將導(dǎo)致電流變化50 mA。此外,假設(shè)系統(tǒng)采用的是滿量程為10 A的12位ADC,則時序誤差將導(dǎo)致ADC的低4.3位丟失。如后續(xù)部分所示,丟失位是最佳情形?;殳B也可能導(dǎo)致反饋系統(tǒng)中出現(xiàn)扭矩紋波和增益誤差。
錯誤采樣時刻的最常見原因為:
● PWM和ADC之間的鏈路不足,無法在正確的時間采樣。
● 缺少足夠的獨立同步采樣保持電路(兩條還是三條取決于被測相位的數(shù)目)。
● 柵極驅(qū)動信號傳播延遲,導(dǎo)致電機電壓與PWM定時器反相。
一般而言,錯誤采樣時刻的嚴(yán)重程度由可能影響di/dt的因素確定。當(dāng)然,時序誤差的大小也很重要,但是電機速度、負載、電機阻抗和直流總線電壓也會對誤差產(chǎn)生直接影響。
3.2 采樣誤差對系統(tǒng)性能的影響
使用推導(dǎo)公式可確定采樣誤差的影響。對于2相電流測量,假設(shè) ia在理想時刻(iae = 0)進行采樣, ib在延遲情況下進行采樣,導(dǎo)致 ibe ≠ 0。在這種情況下,公式9定義的誤差項為:
對于3相電流測量,假設(shè) ia 和 ic 在理想時刻(iae = ice = 0)進行采樣,ib在延遲情況下進行采樣(ibe ≠ 0)。在這種情況下,公式12定義的誤差項為:
從公式13和14可推出一些有趣的結(jié)論。首先,Clarke/Park變換得到測量誤差的方式不同:
所以,如果反饋系統(tǒng)在一相電流測量上有延遲,則對有兩條通道的驅(qū)動器的影響將比對有三條通道的系統(tǒng)的影響大1.73倍。
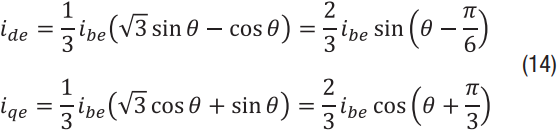
利用公式13和14,還可確定測量延遲對電機扭矩的影響。對于此分析,假定在向電機端子(V000或V111)施加零電壓時對相位電流進行采樣,并且在此期間,唯一的電壓驅(qū)動di/dt為BEMF。對于正弦BEMF,di/dt也將符合正弦函數(shù)——即BEMF過零時di/dt = 0,BEMF達到峰值時di/dt達到最大?,F(xiàn)在,如果在相對于理想采樣時刻的固定延遲下對相位電流采樣,則誤差為正弦型:
其中,x = a,b,c and φ為相對于dq參考系的相位角。使用公式13的ide作為示例:
項 cos(– φ)為失調(diào),而 cos(2 θ – φ)為在兩倍基波頻率處振蕩的交流分量。dq電流中包含這些分量,因此電機扭矩將具有類似的分量。另外需注意,對于三相電流測量,dq參考系的選定方向φ = –π,這意味著失調(diào)項為零。即三條通道均無增益誤差。圖3描述了兩個和三個傳感器型系統(tǒng)之間的不同。
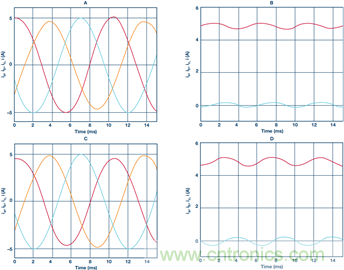
圖3:錯誤采樣時刻的影響。ia、ib、ic和id、iq ,分別帶兩個電流傳感器(A、B)和三個電流傳感器(C、D)。
對于如圖3A和3B所示的三個傳感器,請注意, ib 測量延遲將導(dǎo)致電流(扭矩紋波)為基波頻率的2倍。另外請注意,id 和 iq的直流分量不受影響。
對于如圖3C和3C所示的兩個傳感器,請注意, ib 測量延遲將導(dǎo)致交流分量比有三個傳感器時大1.73倍。此外, id 和 iq 的直流分量也會受影響。
3.3 最大限度地減小采樣時序誤差的影響
由于控制環(huán)路的性能要求提高,所以必須最大限度地減小采樣時序誤差的影響,尤其是在ADC分辨率趨向于越來越高的情況下。幾年前,10至12位ADC很常見,但現(xiàn)在16位的分辨率也已成為常態(tài)。應(yīng)利用好這些額外的位,否則高性能ADC的值將因系統(tǒng)延遲造成的低位丟失而受影響。
最大限度地減小采樣時序誤差的最有效方式是,盡可能靠近所有相位的理想采樣時刻。這可能導(dǎo)致選擇一個針對數(shù)字控制開關(guān)電源轉(zhuǎn)換器進行優(yōu)化的控制器。此外,優(yōu)化柵極驅(qū)動電路中的傳播延遲/偏斜將具有積極影響。
如果最大限度地減小時序誤差仍不能滿足要求,則可通過使用三個電流傳感器和一個帶三條獨立采樣保持電路的ADC,實現(xiàn)性能的顯著提升。
4. 失調(diào)誤差
推導(dǎo)公式也可描述系統(tǒng)對測得電流上的失調(diào)的響應(yīng)方式。首先,通過觀察兩個傳感器的情況和使用公式9的ide作為示例,可將誤差分量表示為:

ia,offset 和 ib,offset分別為a通道和b通道的失調(diào)。從圖中可以看出,失調(diào)將導(dǎo)致在電機的基波頻率處出現(xiàn)電流(和扭矩)的交流分量。如果系統(tǒng)在啟動時進行了失調(diào)校準(zhǔn),則任意剩余失調(diào)都將由漂移造成。在這種情況下,假定傳感器漂移的方式相同,則可近似地認(rèn)為 ia,offset = ib,offset = ioffset can be made.
這意味著誤差分量幅度是相位偏移幅度的兩倍。對于誤差電流的q軸分量,也可得出類似的結(jié)果。對三個電流傳感器的情況執(zhí)行相同的操作,發(fā)現(xiàn)公式12的ide為:
根據(jù)初始失調(diào)已得到校準(zhǔn)且所有傳感器漂移值相同的推理,ia,offset = ib,offset = ic,offset = ioffset:
同樣,具有三個傳感器的優(yōu)勢很明顯,電流傳感器上的失調(diào)將不會受扭矩紋波影響。即使傳感器不是以完全相同的方式漂移,也很可能顯示相同的趨勢。因此,三個傳感器設(shè)置將使具有未校準(zhǔn)失調(diào)誤差的系統(tǒng)中始終具有非常低的扭矩紋波。
4.1 最大限度地減小失調(diào)誤差的影響
電流反饋失調(diào)是電機驅(qū)動器中的扭矩紋波的主要成因之一,應(yīng)最大限度地減少。一般而言,電流反饋上有兩種失調(diào)誤差。首先,任意時間點、任意溫度都存在靜態(tài)失調(diào)。其次,失調(diào)漂移是溫度和時間等參數(shù)的函數(shù)。最大限度地減小靜態(tài)失調(diào)影響的一種常見方法是執(zhí)行失調(diào)校準(zhǔn),校準(zhǔn)可在制造時或每次電機電流為0時進行(通常在電機停止時)。如果采用這種方法,靜態(tài)失調(diào)通常不是問題。
失調(diào)漂移處理起來更復(fù)雜。由于這是一種通常在電機運行時發(fā)生的慢速漂移,因此難以進行在線校準(zhǔn),而且通常不能停止電機。建議采用一些基于觀察器的在線校準(zhǔn)方法,4但觀察器依賴于電機電氣和機械系統(tǒng)的型號。為使在線估算有效,需要電機參數(shù)的準(zhǔn)確知識,但事實通常并非如此。
正如之前討論的,最大限度地減小失調(diào)漂移的最有效方法是采用三相電流測量。假設(shè)通道采用相同類型的元件,則通道的漂移很可能類似。如果是這種情況,失調(diào)會被抵消,而且將不會產(chǎn)生扭矩紋波。即使通道不以相同速率漂移,只要它們在相同方向上漂移,則三通道法將對失調(diào)具有抵消效果。
對于兩相電流測量,即使通道以相同速率漂移,扭矩紋波仍然存在。換言之,兩個傳感器型系統(tǒng)對失調(diào)漂移非常敏感。在這種情況下,避免扭矩紋波的唯一方法是確保漂移保持較小的狀態(tài),這可能會增加成本和反饋系統(tǒng)復(fù)雜性。對于一組給定的性能要求,3通道反饋系統(tǒng)可能是一種高性價比的解決方案,這一點經(jīng)過事實驗證。
5. 增益誤差
當(dāng)系統(tǒng)在電流反饋上具有增益誤差時,誤差信號ixe ix1 (x = a, b, c)成正比:
這是基波頻率時的正弦誤差??梢钥闯?,因增益產(chǎn)生的誤差與因錯誤采樣時序產(chǎn)生的誤差性質(zhì)類似(見公式16)。因此,可推出相同的結(jié)論:
● 如果所有通道上均存在相同的增益誤差,將不會有扭矩紋波;僅有增益誤差。這適用于2通道和3通道系統(tǒng)。
● 如果增益誤差因通道不同而異,則將在兩倍基波頻率處產(chǎn)生扭矩紋波。
● 2通道電流測量對增益誤差的敏感程度比3通道電流測量大1.73倍。
6. 實驗驗證
失調(diào)誤差和增益誤差對測得電流和輸出扭矩的影響在圖4中描述的實驗設(shè)置中得到驗證。
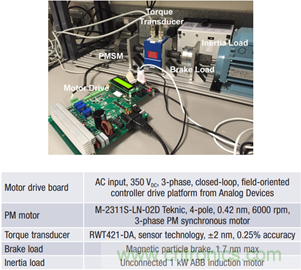
圖4. 測試設(shè)備設(shè)置。
驅(qū)動板中的電流反饋電路在電機三個相位中利用了霍爾效應(yīng)傳感器??稍谲浖羞x擇2相或3相電流測量。失調(diào)校準(zhǔn)在電機未運行時執(zhí)行,因此在正常工作時(沒有時間產(chǎn)生漂移效應(yīng)),失調(diào)和增益誤差相當(dāng)小。由于溫度漂移(盡管有校準(zhǔn)程序),通常都會出現(xiàn)此類誤差,為了描述此類誤差的影響,校準(zhǔn)程序后控制軟件中還引入了人工偏移量和增益誤差。由控制算法得出的測得量將與實際量不同,實際量將包含誤差的影響,如以上各節(jié)所討論。圖5描述了設(shè)定速度參考為520 rpm的情況,此時電機電頻 率為35 Hz。
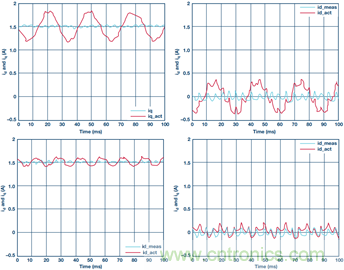
圖5. 實際值(紅色)和測得值(藍色)(從上至下);具有1%失調(diào)誤差的 iq and id ;具有不對稱增益誤差(1.05/0.95)的iq and id
顯然,當(dāng)驅(qū)動器將d軸和q軸電流控制在相對恒定的數(shù)值時,為了維持設(shè)定速度,實際電流包含大量諧波分量,尤其是在失調(diào)誤差的情況下。這些諧波分量會直接影響輸出扭矩紋波。如圖6所示。必須注意,由于測試設(shè)備中有輕微的軸錯位,因此存在顯著的機械扭矩脈動。這出現(xiàn)在機械頻率和部分低次諧波處。但是,仍然可以清楚看到與失調(diào)和增益誤差源相關(guān)的諧波成分變化。對于失調(diào)誤差,電頻率(35 Hz)處的諧波分量將與失調(diào)誤差 百分比成比例地增大,如圖所示,同時電頻率兩倍處的諧波成分隨增益誤差非對稱性增加,正如此理論預(yù)測的。
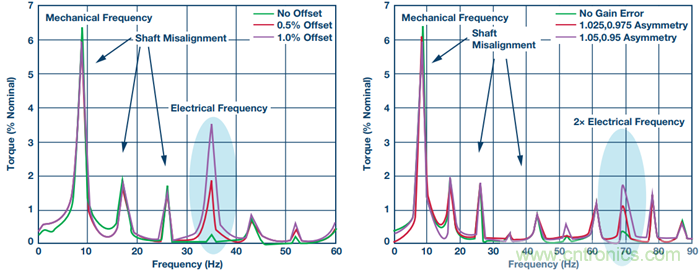
圖6. 進行2相電流測量時測得的扭矩紋波的標(biāo)稱值百分比,以及(左)越來越大的失調(diào)誤差和(右)越來越大的增益誤差。
此外,3相測量的影響可在圖7中清楚看到,失調(diào)誤差感應(yīng)扭矩紋波完全消除,且增益誤差感應(yīng)扭矩紋波減少1.73倍——再一次證實了理論計算的結(jié)果。

圖7. 進行3相電流測量時測得的扭矩紋波的標(biāo)稱值百分比,以及(左)越來越大的失調(diào)誤差和(右)越來越大的增益誤差。
總結(jié)
通過分析和測量,本文描述了電流反饋系統(tǒng)中的非理想效應(yīng)如何影響系統(tǒng)性能。前文說明采用三相電流測量的系統(tǒng)明顯比采用兩相電流測量的系統(tǒng)更耐受測量誤差。
參考電路
1 Weizhe Qian, Sanjib K. Panda, 和 Jian-Xin Xu. “使用迭代學(xué)習(xí)控制的 PM同步電機中的扭矩紋波最小化.” 《IEEE電源電子會刊》,第19 卷第2期,2004年。
2 Dae-Woong Chung, Seung-Ki Sul, 和 Dong-Choon Lee, “矢量控制 AC電機驅(qū)動器中電流測量誤差的分析和補償.” 工業(yè)應(yīng)用大 會,1996年第三十一次IAS年度會議,IAS 1996。1996年IEEE會議 記錄,第1卷,1996年。
3 Somyo Kaitwanidvilai, Werachet Khan-ngern, 和 Montri Panarut. “死 區(qū)時間對PWM逆變器的無用諧波傳導(dǎo)輻射的影響.” 環(huán)境電磁 學(xué),2000年。CEEM 2000。論文集。亞太大會,上海,2000年。
4 Yutaro Uenaka, Masaki Sazawa, 和 Kiyoshi Ohishi, “SPM電機的電流 傳感器失調(diào)和電氣參數(shù)變化的精細自調(diào)諧方法.” IECON 2010— IEEE工業(yè)電子學(xué)會第36次年度會議,2010年。
推薦閱讀:



