
【導(dǎo)讀】由于旋轉(zhuǎn)變壓器能夠在嚴(yán)苛和惡劣的環(huán)境中長期保持出色的可靠性和高精度性能,因此被廣泛用在EV、HEV、EPS、變頻器、伺服、鐵路、高鐵、航空航天,以及其他需要獲取位置和速度信息的應(yīng)用。
在上面的系統(tǒng)中,很多旋轉(zhuǎn)變壓器轉(zhuǎn)換芯片(RDC),例如ADI 公司的 AD2S1210 和 AD2S1205用來獲取數(shù)字位置和速度數(shù)據(jù)??蛻舻南到y(tǒng)會出現(xiàn)干擾和故障問題,很多時候,他們都想評估角度和速度在受干擾條件下的精度性能,找出和驗證引發(fā)問題的根本原因,然后修復(fù)和優(yōu)化系統(tǒng)。帶故障注入功能的高精度旋轉(zhuǎn)變壓器仿真系統(tǒng)(模擬連接到以恒速運行或位置固定的真實電機的旋轉(zhuǎn)變壓器)可以解決干擾和故障問題,而無需搭建復(fù)雜的電機控制系統(tǒng)。
本文將首先分析旋轉(zhuǎn)變壓器仿真系統(tǒng)中的誤差貢獻,并給出一些誤差計算示例,幫助您了解為何高精度對于旋轉(zhuǎn)變壓器仿真器如此重要。然后展示現(xiàn)場應(yīng)用干擾條件下的故障示例。接下來,介紹如何使用最新的高精度產(chǎn)品,構(gòu)建具有故障仿真和注入功能的高精度旋轉(zhuǎn)變壓器仿真器。最后,將展示旋轉(zhuǎn)變壓器仿真器能實現(xiàn)的功能。
旋轉(zhuǎn)變壓器仿真系統(tǒng)中的誤差貢獻
首先,本節(jié)將介紹理想的旋轉(zhuǎn)變壓器結(jié)構(gòu)。然后,將給出五個常見的非理想特性和誤差分析方法,幫助您理解為什么旋轉(zhuǎn)變壓器仿真器系統(tǒng)需要高精度。
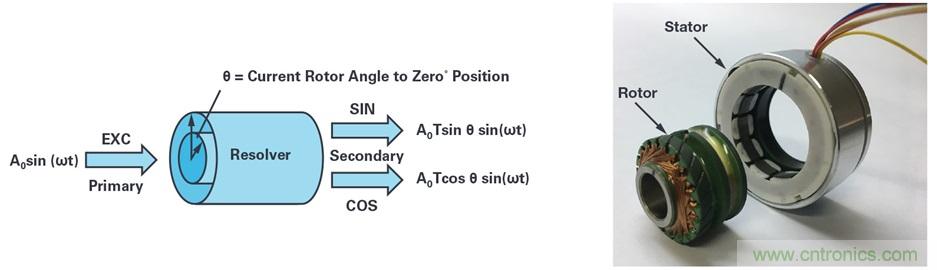
圖1. 旋轉(zhuǎn)變壓器結(jié)構(gòu)。
如圖1所示,旋轉(zhuǎn)變壓器仿真器將模擬連接到以恒速運行或位置固定的真實電機的旋轉(zhuǎn)變壓器。經(jīng)典款或可變磁阻旋轉(zhuǎn)變壓器包含轉(zhuǎn)子和定子??梢詫⑿D(zhuǎn)變壓器視為一種特殊的變壓器。在初級側(cè),如方程式1所示,EXC表示正弦激勵輸入信號。在次級側(cè),如方程式2和方程式3所示,SIN和COS表示兩個輸出端的調(diào)制的正余弦信號。
其中:
θ 是軸角, ω 是激勵信號頻率, A0 是激勵信號幅度, T 是旋轉(zhuǎn)變壓器變比。
調(diào)制的SIN/COS信號如圖2所示。對于不同象限中的恒定角θ,SIN/COS信號會出現(xiàn)同相和反相情況。對于恒速,SIN/COS包絡(luò)的頻率是恒定的,指示速度信息。
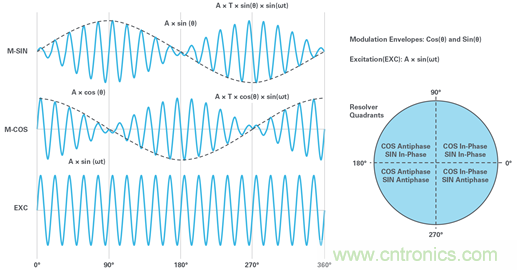
圖2. 旋轉(zhuǎn)變壓器電氣信號。
對于ADI的所有RDC產(chǎn)品,解調(diào)信號如方程式4表示。當(dāng)φ (輸出數(shù)字角度)等于旋轉(zhuǎn)變壓器的角度θ (轉(zhuǎn)子的位置)時,Type II 跟蹤環(huán)路完成。在真實旋轉(zhuǎn)變壓器系統(tǒng)中,幅度失配、相移、不完全正交、諧波激勵和感應(yīng)諧波這五種非理想情況都有可能發(fā)生,導(dǎo)致出現(xiàn)誤差。
幅度失配
幅度失配是SIN和COS信號達(dá)到峰值幅度(COS為0°和180°,SIN為90°和270°)時,它們的峰峰值幅度之差。旋轉(zhuǎn)變壓器繞組的差異或者SIN/COS信號的不平衡增益控制都可能導(dǎo)致失配。為了確定幅度失配引起的位置誤差,可以將方程式3更改為方程式5。
其中 a 表示SIN和COS信號之間的失配量,解調(diào)之后余下的包絡(luò)信 號則可以如方程式6所示輕松顯示。通過將方程式6設(shè)置為等于0來促使Type II跟蹤環(huán)路中的包絡(luò)信號歸0時,可以發(fā)現(xiàn)位置誤差ε = θ – φ。然后我們可以得到誤差信息,如方程式7所示。
在真實情況中,如果a很小,位置誤差也很小,意味著 sin?(ε) ≈ ε and θ + φ ≈ 2θ。所以,方程式7變成方程式8,誤差項用弧度表示。
如方程式8所示,誤差項按兩倍轉(zhuǎn)動速度起伏,最大誤差 a/2 在 45°的奇整數(shù)倍時達(dá)到。假設(shè)幅度失配為0.3%,代入方程式8中的變量,并使用45°的奇整數(shù)倍,最大誤差將在方程式9中表示,其中 m 是一個奇整數(shù)。
當(dāng)RDC模式為12位時,可以通過方程式10將按弧度計算的誤差轉(zhuǎn)化為LSB,約為1LSB。

相移
相移包含差模相移和共模相移。差模相移是旋轉(zhuǎn)變壓器的SIN和COS信號之間的相移。共模相移是激勵參考信號與SIN和COS信號之間的相移。為了確定差模相移引起的位置誤差,可以將方程式3更改為方程式11。
其中 a 表示差模相移,當(dāng)正交項cos?(wt)(sin(a)sin(θ)cos(φ)) 被忽略 時,解調(diào)之后余下的包絡(luò)信號可以使用方程式12表示。在真實 情況下,當(dāng)a 很小時, cos(a) ≈ 1 – a2/2。通過將方程式10設(shè)置為等于0來促使Type II跟蹤環(huán)路中的包絡(luò)信號歸0時,可以發(fā)現(xiàn)由此導(dǎo)致的位置誤差?ε = θ – φ。然后我們可以獲得誤差信息,如方程式13所示。
θ ≈ φ時, 在θ ≈ 45°時,sin(θ)cos(φ)的最大值為0.5。所以,方程式13變成方程式14,誤差項用弧度表示。
假設(shè)差模相移為4.44°,當(dāng)RDC模式為12位時,可以使用方程式15轉(zhuǎn)化為LSB的誤差值約為1 LSB。

當(dāng)共模相移為 β,可以將方程式2和3分別改寫為方程式16和17。

同樣,誤差項可以用方程式18表示。
在靜態(tài)工作條件下,共模相移不會影響轉(zhuǎn)換器的精度,但由于轉(zhuǎn)子阻抗和目標(biāo)信號的無功分量,運動中的旋轉(zhuǎn)變壓器會產(chǎn)生速度電壓。速度電壓位于目標(biāo)信號象限內(nèi),它僅在運動時產(chǎn)生,在靜態(tài)角度下并不存在。當(dāng)共模相移為 β時,跟蹤誤差幾乎可以用方程式19表示,其中 ωM是電機速度, ωE是激勵速度。
如方程式19所示,誤差與旋轉(zhuǎn)變壓器的速度和相移成正比。因此,一般而言,使用高旋轉(zhuǎn)變壓器激勵頻率大有裨益。
不完全正交
不完全正交表示在這種情況下SIN/COS所指的兩個旋轉(zhuǎn)變壓器信號并不是準(zhǔn)確的90°正交。當(dāng)兩個旋轉(zhuǎn)變壓器相位并不是以完全空間正交的方式加工或裝配時,就會發(fā)生這種情況。當(dāng) β表示不完全正交的量時,可以將方程式2和3分別改寫為方程式20和21。

和之前一樣,解調(diào)之后余下的包絡(luò)信號可以如方程式22所示輕松顯示。當(dāng)您將方程式22的值設(shè)置為0,假設(shè) β 很小,cos(β) ≈ 1 and sin(β) ≈ β,時,可以發(fā)現(xiàn)有此導(dǎo)致的位置誤差ε = θ – φ。然后我們可以接收誤差信息,如方程式23所示。

如方程式23所示,當(dāng)β/2 2的最大誤差達(dá)到45°的奇整數(shù)倍時,誤差項按兩倍轉(zhuǎn)動速度起伏。與幅度失配引起的誤差相比,在本例中,平均誤差為非零,峰值誤差等于正交誤差。在幅度失配示例中,當(dāng) β = 0.0003,弧度= 0.172°時,在12位模式下可能產(chǎn)生約1 LBS誤差。
諧波激勵
在前面的分析中,假設(shè)激勵信號是一個理想的正弦信號,不包含附加諧波。在實際系統(tǒng)中,激勵信號確實含有諧波。因此,方程式2和方程式3可以改寫為方程式24和方程式25。
解調(diào)之后余下的包絡(luò)信號可以如方程式26所示輕松顯示。在 Type II跟蹤環(huán)路中促使此信號歸零。

將方程式26設(shè)置為0,可以發(fā)現(xiàn)由此導(dǎo)致的位置誤差ε = θ – φ 。然后我們可以獲得誤差信息,如方程式27所示。

如果旋轉(zhuǎn)變壓器激勵具有相同的諧波,則方程式27的分子為零,不產(chǎn)生位置誤差。這意味著即使值非常大時,共激勵諧波對RDC的影響也可以忽略不計。但是,如果SIN或COS中的諧波含量不同,所產(chǎn)生的位置誤差與方程式8所示的幅度失配具有相同的函數(shù)形狀。這會嚴(yán)重影響位置精度。
感應(yīng)諧波
實際上,不可能建立一個電感曲線是位置的完美正弦和余弦函數(shù)的旋轉(zhuǎn)變壓器。正常情況下,電感中包含諧波,VR旋轉(zhuǎn)變壓器包含直流分量。因此,方程式2和方程式3可以分別改寫為方程式28和方程式29,其中K0表示直流分量。
解調(diào)之后余下的包絡(luò)信號可以如方程式30所示。
在Type II跟蹤環(huán)路中,促使此信號歸零,在諧波幅度較小, n > 1,且Kn << 1時,可利用方程式31計算誤差信息ε = θ – φ 。

根據(jù)這個方程式,相比諧波效應(yīng),誤差對直流項更為敏感,它與感應(yīng)諧波幅度成正比。與此同時,第n個電感諧波決定了位置誤差的第(n – 1)個諧波的幅度。
旋轉(zhuǎn)變壓器仿真器系統(tǒng)中的誤差貢獻總結(jié)
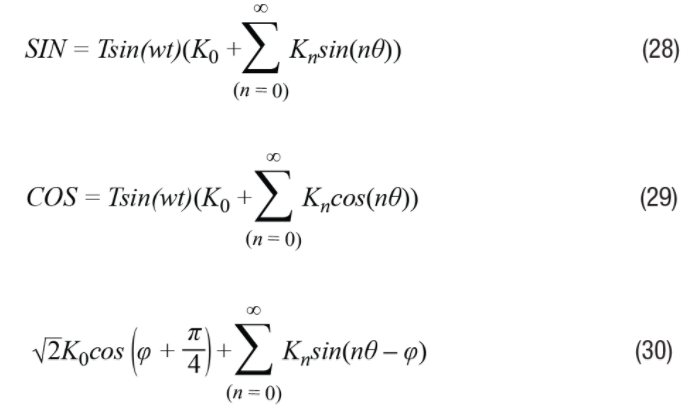
除了上述誤差源外,耦合到SIN和COS線的干擾、放大器的失調(diào)誤差、偏置誤差等也會導(dǎo)致產(chǎn)生系統(tǒng)誤差。旋轉(zhuǎn)變壓器仿真器系統(tǒng)的誤差源和貢獻總結(jié)如表1所示,其中包括12位模式1 LSB這個最差的示例。也可以參考該表,計算另一種RDC分辨率模式的值。
表1. 旋轉(zhuǎn)變壓器仿真器系統(tǒng)中的誤差源和貢獻總結(jié)
RDC系統(tǒng)中的故障類型
在真實的RDC系統(tǒng)中,會出現(xiàn)大量故障情況。以下章節(jié)將顯示現(xiàn)場測試期間出現(xiàn)的不同故障類型和一些故障信號,以及如何使用第三節(jié)介紹的旋轉(zhuǎn)變壓器仿真器解決方案來模擬故障類型。除上述故障類型外,還可能存在隨機干擾,導(dǎo)致出現(xiàn)另一故障,或者同時發(fā)生一些其他故障。
錯接故障
錯接是指通過不正確的連接將旋轉(zhuǎn)變壓器激勵和SIN/COS對連接到RDC SIN/COS輸入和激勵輸出引腳。錯接發(fā)生時,RDC也可 以解碼角度和速度信息,但是角度輸出數(shù)據(jù)會顯示跳變,就像 DAC 輸出中的偏置誤差。請參考圖3,查看錯接案例和結(jié)果數(shù)據(jù)。其中,第一列顯示EXC/SIN/COS引腳和輸出角度,其余列顯示錯接情況。
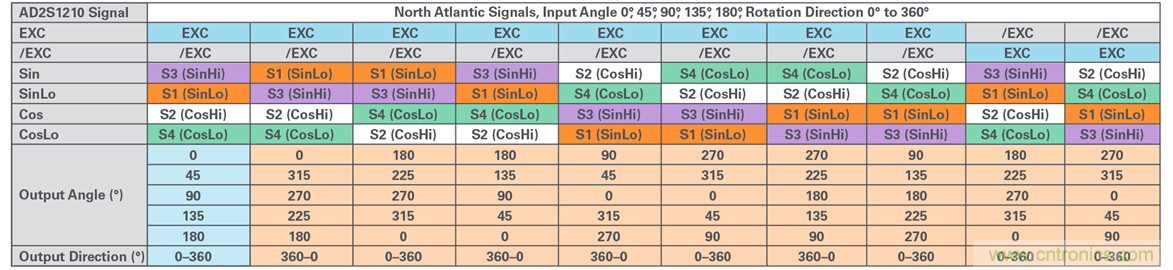
圖3. 旋轉(zhuǎn)變壓器錯接和角度輸出。
相移故障
從誤差貢獻章節(jié),我們了解了相移包括差模相移和共模相移。鑒于差模相位可以被視為共模相移的差,所以,在本節(jié)中,相移故障是指由共模相移引起的故障。
請參考圖4,查看共模相移誤差貢獻。相位1表示激勵濾波器延遲。相位2表示旋轉(zhuǎn)變壓器相移。相位3表示線路延遲。相位4表示SIN/COS濾波器延遲。在現(xiàn)場RDC系統(tǒng)中,當(dāng)相移誤差發(fā)生時,意味著相位1、相位2、相位3和相位4的總值大于44°。正常情況下,旋轉(zhuǎn)變壓器相移誤差為10°。非正常情況下,總相位誤 差可以達(dá)到30°。出于量產(chǎn)考慮,需要留下足夠的相位裕度。
當(dāng)SIN/COS的相移不同時,會引起相移失配故障。如果發(fā)生這種情況,角度和速度精度將會受到影響。
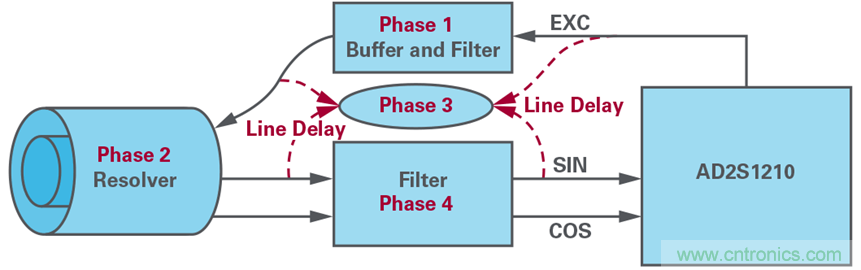
圖4. 相移誤差貢獻。
斷開故障
當(dāng)旋轉(zhuǎn)變壓器的任何線路與RDC平臺接口斷開連接時,就會發(fā)生斷開故障。隨著產(chǎn)品的安全水平不斷提高,線路斷開檢測一再受到客戶關(guān)注。我們可以模擬這個故障,將SIN/COS設(shè)置為零電壓。發(fā)生連接斷開的情況時,可以在 AD2S1210中觸發(fā)LOS/DOS/LOT故障。
幅度失配/超限故障
當(dāng)電路增益控制或SIN/COS的旋轉(zhuǎn)變壓器比值不同時,會發(fā)生幅度失配,這也意味著SIN/COS包絡(luò)的幅度值不同。當(dāng)幅度接近AVDD時,會觸發(fā)幅度超限故障。對于AD2S1210,這被稱為削波故障。請參考圖5,查看不錯的SIN/COS信號示例。
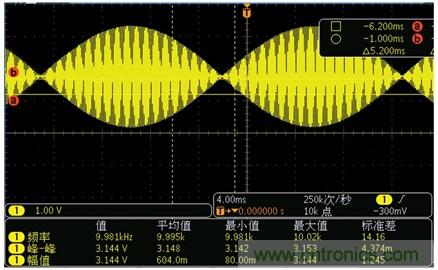
圖5. 理想的SIN/COS信號。
IGBT干擾故障
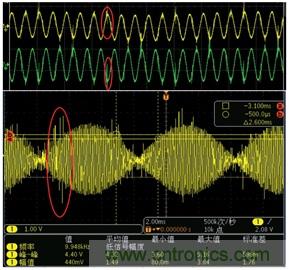
圖6. SIN/COS耦合IGBT干擾。
IGBT干擾是指干擾信號與IGBT開關(guān)的開/關(guān)效應(yīng)相耦合。當(dāng)信號與SIN/COS線耦合時,位置和速度性能會受影響,角度值會發(fā)生跳變,速度方向可能變化。圖6所示為一個現(xiàn)場示例,其中通道1是SIN信號,通道2是COS信號,毛刺表示干擾與IGBT開關(guān)耦合。
超速故障
當(dāng)電角度的速度高于旋轉(zhuǎn)變壓器解碼系統(tǒng)的速度時,就會發(fā)生超速故障。例如,在12位模式下,AD2S1210所能支持的最大速度為1250 SPS,當(dāng)旋轉(zhuǎn)變壓器電角度的速度為1300 SPS時,就會觸發(fā)超速故障。
旋轉(zhuǎn)變壓器仿真器系統(tǒng)架構(gòu)和描述
從第一節(jié),我們知道幅度和相位誤差會直接決定解碼角度和速度性能。幸運的是,ADI提供龐大的精密產(chǎn)品組合,您可以從中選擇合適的產(chǎn)品來構(gòu)建旋轉(zhuǎn)變壓器仿真器系統(tǒng)。下面的描述將展示如何構(gòu)建高精度的旋轉(zhuǎn)變壓器仿真器,并討論應(yīng)選擇哪些器件。
對于圖7所示的仿真器框圖,有7個模塊需要注意:
1. 用于數(shù)據(jù)分析和控制的過程控制平臺。
2. 同步時鐘生成模塊,為子系統(tǒng)生成同步時鐘。
3. 故障信號生成模塊,生成不同的故障信號。
4. SIN/COS生成模塊,生成經(jīng)過調(diào)制的SIN/COS信號作為旋轉(zhuǎn)變壓器輸出。
5. 信號采集模塊,作為激勵和反饋信號采集模塊。
6. SIN/COS輸出模塊,處理包含緩沖區(qū)、增益和濾波器的SIN/COS輸出。
7. 激勵信號輸入模塊,自帶緩沖和濾波電路。
8. 電源模塊,為ADC、DAC、開關(guān)、放大器等元器件提供電源。
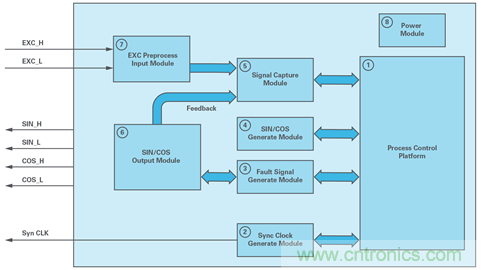
圖7. 旋轉(zhuǎn)變壓器仿真器框圖。
旋轉(zhuǎn)變壓器仿真器系統(tǒng)工作時,讓信號采集模塊從輸入模塊采集激勵信號樣本,然后由處理器分析其頻率和幅度。處理器使用CORDIC算法計算SIN/COS DAC輸出數(shù)據(jù)代碼,然后通過SIN/COS模塊生成與激勵輸入相同頻率的正弦信號。系統(tǒng)將同時采集激勵和SIN/COS信號,計算并調(diào)整SIN/COS相位/幅度,補償激勵和SIN/COS之間的相位誤差,使其等于零,然后將SIN/COS幅度校準(zhǔn)到相同水平。最后,系統(tǒng)將生成經(jīng)過調(diào)制的SIN/COS信號和故障信號,以模擬角度性能、速度和故障情況。
圖8中所示的信號鏈顯示了一個雙16位sim SAR ADC AD7380用于 在OSR使能,SNR可以達(dá)到98 dB時采集激勵和反饋信號。它非常適合同時進行高精度的相位和幅度校準(zhǔn)數(shù)據(jù)采集。超低功耗、低失真的 ADA4940-2 被作為ADC驅(qū)動器。采用高精度、低噪聲的 20位DAC AD5791 來生成SIN/COS信號和故障信號,從降低分辨率 和成本方面考慮,可以使用 AD5541A 或 AD5781 來代替 AD5791。高精度、可選增益差分放大器 AD8475, 被用作輸入/輸出緩沖器。 具有超低失調(diào)漂移和電壓噪聲放大功能的高精度軌對軌運算放大器AD8676 和AD8599, 用于構(gòu)建有源濾波器和加法電路。最大電 阻0.8 Ω的單電源軌對軌雙SPDT ADG854,用于開關(guān)和選擇SIN/COS信 號,然后發(fā)送至數(shù)據(jù)采集模塊。
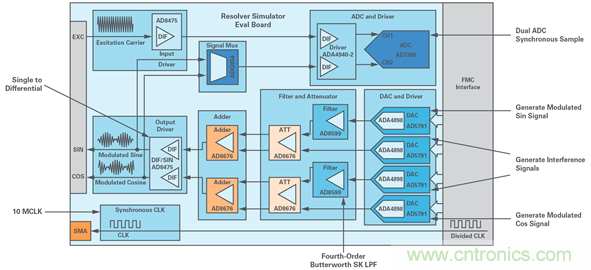
圖8. 旋轉(zhuǎn)變壓器仿真器信號鏈。
整個旋轉(zhuǎn)變壓器仿真器系統(tǒng)通過外部的12 V適配器供電,該適配器使用直流-直流轉(zhuǎn)換器和LDO穩(wěn)壓器,提供不同的電壓電平。參考圖9,查看詳細(xì)的電源信號鏈。使用 ADP5071, 可以產(chǎn)生 正負(fù)16 V電壓,但使用 ADP7118 和 ADP7182??梢陨筛逦⒏€(wěn)定的正負(fù)15V電壓。這些電源主要用于為DAC相關(guān)電路供電。同樣,可以使用ADP2300, ADP7118, ADM660, 和 AD7182。這些電源主要用于為ADC 相關(guān)電路供電,且滿足詳細(xì)的設(shè)計要求。
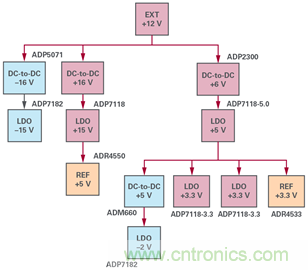
圖9. 電源信號鏈。
旋轉(zhuǎn)變壓器仿真器平臺測試和結(jié)果
參考圖10,查看完整的系統(tǒng)平臺測試。它包含一個旋轉(zhuǎn)變壓器仿真器板、一個AD2S1210評估板和一個GUI。請參見圖11,查看GUI和平臺測試圖。AD2S1210 GUI用于直接評估旋轉(zhuǎn)變壓器仿真器的性能,尤其是角度和速度性能。通過旋轉(zhuǎn)變壓器仿真器 GUI,可以配置速度、角度性能和故障信號。
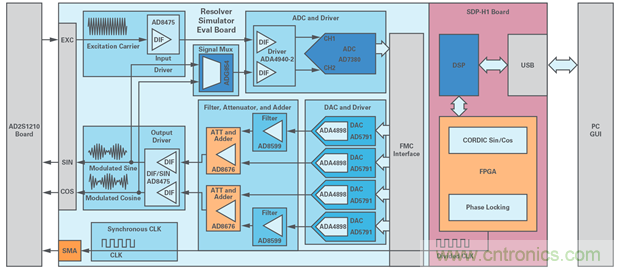
圖10. 實驗測試框圖。
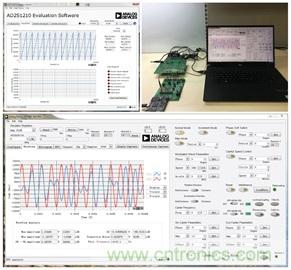
圖11.實驗測試和GUI。
參考圖12,查看已禁用遲滯模式的16位AD2S1210的角度和速度性能INL。
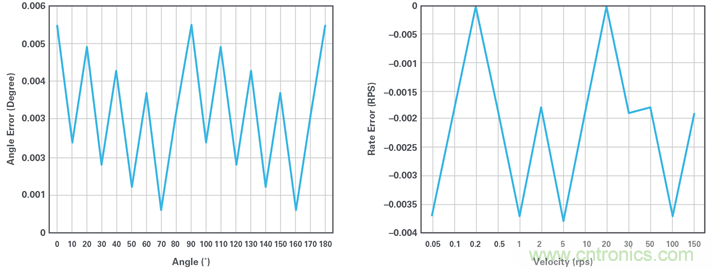
圖12. 角度/速度INL。
請參考表2,查看與標(biāo)準(zhǔn)旋轉(zhuǎn)變壓器仿真器器件相比,此解決方案的性能數(shù)據(jù)。使用AD5791得出的理論角度精度為0.0004°,在實際基準(zhǔn)測試中,角度精度為0.006°,最大速度輸出為3000 rps速度精度為0.004 rps,很容易滿足AD2S1210在10為至約16位模式下的要求。
表2. 性能比較

參考表3,查看此仿真器支持的故障模式。對于與相位相關(guān)的故障,0°至大約360°的范圍可以支持SIN/COS信號。對于與幅度相關(guān)的故障,0 V到大約5 V的范圍可以支持SIN/COS信號。此解決方案還可以用于模擬超速、IGBT、連接斷開等故障。
表3. 故障模式和支持的范圍

參考圖13,查看關(guān)于IGBT故障的測試示例。將仿真器輸出配置為45°,然后在SIN/COS輸出中添加周期性干擾信號。從AD2S1210 評估板GUI顯示的角度和速度性能可以看出,角度性能在45°左右波動,而速度則在0 rps左右波動。
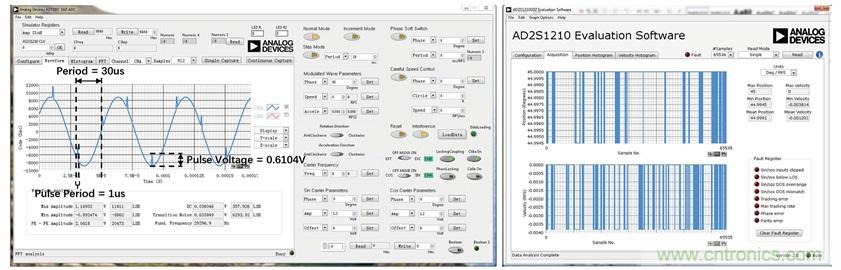
圖13. IGBT干擾示例。
結(jié)論
大多數(shù)RDC相關(guān)應(yīng)用中都存在干擾,干擾嚴(yán)重時會觸發(fā)多種類型的故障。當(dāng)您構(gòu)建自己的旋轉(zhuǎn)變壓器仿真器時,請遵循此解決方案,因為它不僅可以幫助您評估干擾條件下的系統(tǒng)性能,還可以像標(biāo)準(zhǔn)仿真器一樣校準(zhǔn)和驗證您的產(chǎn)品。詳細(xì)的誤差分析可以幫助您理解為什么需要精確的模擬SIN/COS信號;可以模擬本文討論的所有故障類型,以幫助進行一些功能安全驗證。
參考電路
Boyes, Geoffrey. “自整角機和旋轉(zhuǎn)變壓器轉(zhuǎn)換。”ADI公司,1980年。
Hanselman, Duane C. “用于高精度旋轉(zhuǎn)變壓器數(shù)字轉(zhuǎn)換的旋轉(zhuǎn)變壓 器信號要求。” ”IEEE Trans.Ind.Electron.,第37卷第6期,1990年12月。
Lynch, Michael. “高精密電壓源。” ADI公司,2017年10月。
O’Meara, Shane. AD7380評估套件。 ADI公司,2019年。
Symczak, Jakub, Shane O’Meara, Johnny Gealon 和 Christopher Nelson De La Rama “精密旋變數(shù)字轉(zhuǎn)換器測量角位置和速度。”ADI公司,2014年3月。
致謝
非常感謝ADI實習(xí)生Edward Luo、應(yīng)用工程師Shane O ‘Meara、Steven Xie、Karl Wei和Michael Lynch對本文的設(shè)計和測試工作提出的建議和支持。
推薦閱讀:



