
【導讀】在功率電子(例如驅動技術)中,IGBT經常用作高電壓和高電流開關。這些功率晶體管由電壓控制,其主要損耗產生于開關期間。為了最大程度減小開關損耗,要求具備較短的開關時間。
然而,快速開關同時隱含著高壓瞬變的危險,這可能會影響甚至損壞處理器邏輯。因此,為IGBT提供合適柵極信號的柵極驅動器,還執(zhí)行提供短路保護并影響開關速度的功能。然而,在選擇柵極驅動器時,某些特性至關重要。
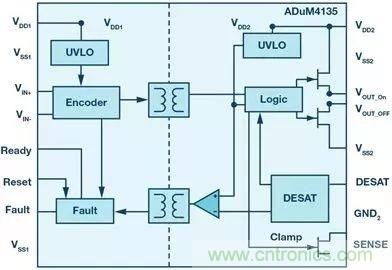
圖1. 隔離式柵極驅動器ADuM4135的簡化原理圖。
電流驅動能力
在開關期間,晶體管會處于同時施加了高電壓和高電流的狀態(tài)。根據(jù)歐姆定律,這將導致一定的損耗,具體取決于這些狀態(tài)的持續(xù)時間(參見圖2)。目標是要最大程度地減小這些時間段。此處的主要影響因素是晶體管的柵極電容,為實現(xiàn)開關必須對其進行充電/放電。較高的瞬態(tài)電流會加速此過程。
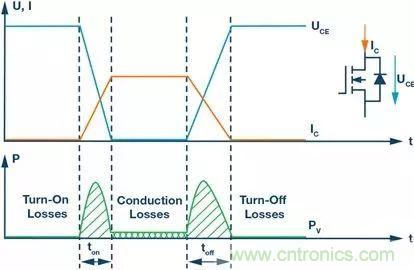
圖2. 晶體管各個損耗分量的簡化表示。
因此,能夠在更長時間內提供更高柵極電流的驅動器對開關損耗更能起到積極作用。例如,ADI公司的ADuM4135可以提供高達4A的電流。根據(jù)IGBT的不同,這可能會使開關時間處于很小的幾ns范圍內。
時序
開關時間最小化的決定性因素是輸出上升時間(tR)、下降時間(tF)和傳播延遲(tD)。傳播延遲定義為輸入沿到達輸出所需的時間,并取決于驅動器輸出電流和輸出負載。傳播延遲通常伴隨脈沖寬度失真(PWD),其為上升沿時延和下降沿時延之間的差值:
因為驅動器通常具有多個輸出通道,盡管采用相同的輸入驅動,但仍會具有不同的響應時間,因此會產生小的附加偏置,即傳播延遲偏斜(tSKEW)。
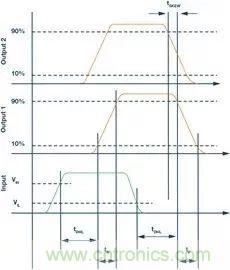
圖3. 具有多個輸出的柵極驅動器的時序行為。
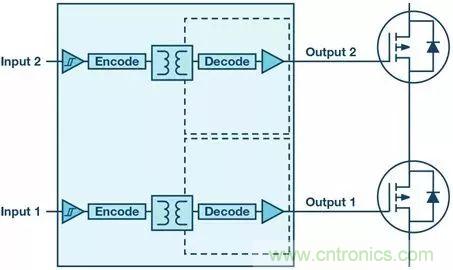
圖4. 具有多個輸出的柵極驅動器的簡單原理圖。
隔離耐受電壓
在電力電子中,出于功能和安全考慮需要進行隔離。由于采用了柵極驅動器(例如在驅動技術中采用半橋拓撲形式),因此會與高總線電壓和電流接觸,隔離不可避免。
功能方面的原因是功率級的驅動通常發(fā)生在低壓電路中,因此無法驅動半橋拓撲的高端開關,因為低端開關同時打開時,它的電位較高。同時,隔離代表在發(fā)生故障時高壓部分與控制電路的可靠隔離,從而可以進行人為接觸。隔離式柵極驅動器的Viso(隔離耐壓等級)通常為5kV(rms)/min或更高。
抗擾度
惡劣的工業(yè)環(huán)境要求應用對干擾源具有最佳抗擾度或抗干擾性。例如,RF噪聲、共模瞬變和干擾磁場是關鍵性因素,因為它們可以耦合到柵極驅動器中,并且會激勵功率級,使其在不希望的時間內進行開關。隔離式柵極驅動器的共模瞬變抗擾度(CMTI)定義了抑制輸入和輸出之間共模瞬變的能力。例如,ADuM4121具有出色的大于150kV/μs的規(guī)格值。
本文提到的參數(shù)僅代表柵極驅動器規(guī)格的一部分,并不代表完整列表。其他決定性因素包括工作電壓、電源電壓、溫度范圍以及附加集成功能(如米勒箝位和去飽和保護)。因此,可根據(jù)應用需求選擇大量不同的柵極驅動器。
推薦閱讀:




