
【導(dǎo)讀】無人機(jī)最早是在20世紀(jì)20年代出現(xiàn)的,1914年第一次世界大戰(zhàn)中有人研制一種不用人駕駛,而用無線電操縱的小型飛機(jī)?,F(xiàn)代戰(zhàn)爭是推動(dòng)無人機(jī)發(fā)展的基本動(dòng)力。世界第一架無人機(jī)誕生于1917年,而無人機(jī)真正投入作戰(zhàn)始于越南戰(zhàn)爭,主要用于戰(zhàn)場偵察。
無人駕駛飛機(jī)簡稱“無人機(jī)”,英文縮寫為“UAV”,主要是利用無線電遙控設(shè)備和自備的程序控制裝置操縱的不載人飛機(jī)。

無人機(jī)的起源
無人機(jī)最早是在20世紀(jì)20年代出現(xiàn)的,1914年第一次世界大戰(zhàn)中有人研制一種不用人駕駛,而用無線電操縱的小型飛機(jī)?,F(xiàn)代戰(zhàn)爭是推動(dòng)無人機(jī)發(fā)展的基本動(dòng)力。世界第一架無人機(jī)誕生于1917年,而無人機(jī)真正投入作戰(zhàn)始于越南戰(zhàn)爭,主要用于戰(zhàn)場偵察。
1982年以色列與敘利亞在貝卡谷戰(zhàn)爭中,以色列使用無人機(jī)進(jìn)行偵察、干擾、誘敵,無人機(jī)的作用再次被重視和開發(fā)。
1991年初的海灣戰(zhàn)爭中無人機(jī)已成為 “必須有”的戰(zhàn)場能力,六套先鋒無人機(jī)系統(tǒng)參戰(zhàn)。提供了高品質(zhì)、近實(shí)時(shí)、全天時(shí)的偵察、監(jiān)視、目標(biāo)捕獲、攔截和戰(zhàn)損評估。

科索沃戰(zhàn)爭是歷次戰(zhàn)爭中使用無人機(jī)架次最多的一次,也是發(fā)揮作用最大的一次。
1995年第一次俄羅斯車臣反恐戰(zhàn)爭和1999年第二次俄羅斯車臣反恐戰(zhàn)爭中,俄軍使用了無人偵察機(jī)對戰(zhàn)區(qū)進(jìn)行偵察和監(jiān)視,尤其在第二次車臣戰(zhàn)爭中,俄軍的“蜜蜂”無人偵察機(jī)偵察了大量叛軍資料,為俄軍精確打擊提供準(zhǔn)確資料。
前述戰(zhàn)爭中,無人機(jī)擔(dān)當(dāng)?shù)闹饕莻刹斓慕巧?,在阿富汗?zhàn)爭中,美國用“捕食者”作為載機(jī),發(fā)射了“AGM-114C”“海爾法”空地導(dǎo)彈,首次在實(shí)戰(zhàn)中實(shí)現(xiàn)了無人機(jī)發(fā)射導(dǎo)彈直接對地定點(diǎn)攻擊,進(jìn)一步發(fā)展了作戰(zhàn)無人機(jī)的功能,也是對無人作戰(zhàn)飛機(jī)的實(shí)戰(zhàn)使用進(jìn)行了驗(yàn)證,真正開始了無人化戰(zhàn)爭的起步。

無人機(jī)的種類
按功能無人機(jī)可以分為軍用無人機(jī)和民用無人機(jī)兩大類。
軍用無人機(jī)又分為信息支援、信息對抗、火力打擊三大類;而民用無人機(jī)包括檢測巡視類無人機(jī)、通信中繼類無人機(jī)、遙感繪制類無人機(jī)和時(shí)敏目標(biāo)打擊類無人機(jī)。本文重點(diǎn)討論民用無人機(jī)系統(tǒng)。
從技術(shù)角度,民用無人機(jī)一般可以分為:無人固定翼機(jī))、無人直升機(jī)、無人多旋翼飛行器等。
1、固定翼無人機(jī):

優(yōu)點(diǎn):續(xù)航時(shí)間長、航程遠(yuǎn)、飛行速度快、飛行高度高、負(fù)載能力強(qiáng)
缺點(diǎn):起降受場地限制、不能在空中懸停
2、直升機(jī)無人機(jī)

優(yōu)點(diǎn):載荷較大、可垂直起降、空中懸停、靈活性強(qiáng)
缺點(diǎn):結(jié)構(gòu)復(fù)雜、故障率高、維修成本高、續(xù)航時(shí)間短
3、多旋翼無人機(jī)

優(yōu)點(diǎn):操作靈活、結(jié)構(gòu)簡單、成本低、起降方便、可在空中懸停
缺點(diǎn):續(xù)航時(shí)間短、負(fù)載能力弱、飛行速度慢
無人機(jī)主要硬件結(jié)構(gòu)
1、芯片
一個(gè)高性能FPGA芯片就可以在無人機(jī)上實(shí)現(xiàn)雙CPU的功能,以滿足導(dǎo)航傳感器的信息融合,實(shí)現(xiàn)無人飛行器的最優(yōu)控制。
2、慣性傳感器
伴隨著應(yīng)用加速計(jì)、陀螺儀、地磁傳感器等設(shè)備廣泛應(yīng)用,MEMS慣性傳感器開始大規(guī)模興起,6軸、9軸的慣性傳感器也逐漸取代了單個(gè)傳感器,成本和功耗也進(jìn)一步降低。
3、WIFI等無線通信
wifi等通信芯片用于控制和傳輸圖像信息,通信傳輸速度和質(zhì)量已經(jīng)可以充分滿足幾百米的傳輸需求。
4、電池
電池能量密度不斷增加,使得無人機(jī)在保持較輕的重量下,續(xù)航時(shí)間能有25-30分鐘,達(dá)到可以滿足一些基本應(yīng)用的程度,此外,太陽能電池技術(shù)使得高海拔無人機(jī)可持續(xù)飛行一周甚至更長時(shí)間。
5、云臺
安裝、固定攝像機(jī)的支撐設(shè)備,它要保證無人機(jī)在各種環(huán)境下做到穩(wěn)定拍攝。
6、飛機(jī)機(jī)體
包含螺旋槳、電機(jī)馬達(dá)、機(jī)體外殼等
7、相機(jī)等
包括4K、3D、高像素?cái)z像頭等。
無人機(jī)主要系統(tǒng)
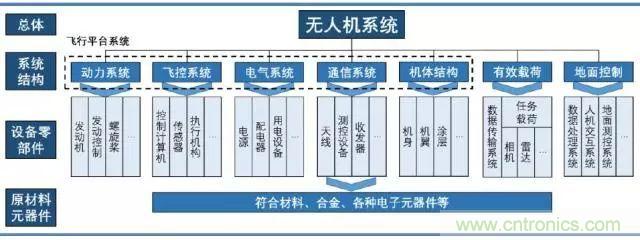

無人機(jī)系統(tǒng)主要由三部分組成,分別為飛行器平臺、控制站與通訊鏈路。
飛行器平臺:包括飛行機(jī)體結(jié)構(gòu)、動(dòng)力系統(tǒng)、飛控系統(tǒng)、導(dǎo)航系統(tǒng)、電氣系統(tǒng)、通信系統(tǒng);
控制站:包括顯示系統(tǒng)、操縱系統(tǒng);
通訊鏈路:包括機(jī)載通訊與地面通訊。
1、飛控系統(tǒng)
飛控系統(tǒng)是無人機(jī)的“駕駛員”,是無人機(jī)完成起飛、空中飛行、執(zhí)行任務(wù)和返場回收等整個(gè)飛行過程的核心系統(tǒng)。
飛控一般包括傳感器、機(jī)載計(jì)算機(jī)和伺服作動(dòng)設(shè)備三大部分,實(shí)現(xiàn)的功能主要有無人機(jī)姿態(tài)穩(wěn)定和控制、無人機(jī)任務(wù)設(shè)備管理和應(yīng)急控制三大類。其中,機(jī)身大量裝配的各種傳感器(包括角速率、姿態(tài)、位置、加速度、高度和空速等)是飛控系統(tǒng)的基礎(chǔ),是保證飛機(jī)控制精度的關(guān)鍵。未來要求無人機(jī)傳感器具有更高的探測精度、更高的分辨率,因此高端無人機(jī)傳感器中大量應(yīng)用了超光譜成像、合成孔徑雷達(dá)、超高頻穿透等新技術(shù)。
現(xiàn)有飛控系統(tǒng)是開源與閉源系統(tǒng)的結(jié)合。國內(nèi)優(yōu)秀的無人機(jī)廠商,為了提高系統(tǒng)的專業(yè)化,則大部分在開源系統(tǒng)的基礎(chǔ)上演化出自己的閉源系統(tǒng)。相比開源系統(tǒng),無人機(jī)廠商自身的閉源系統(tǒng)加入了許多優(yōu)化算法、簡化了調(diào)參與線束,變得更加簡單易用。
2、導(dǎo)航系統(tǒng)
導(dǎo)航系統(tǒng)是無人機(jī)的“眼睛”,多技術(shù)結(jié)合是未來方向。
導(dǎo)航系統(tǒng)向無人機(jī)提供參考坐標(biāo)系的位置、速度、飛行姿態(tài),引導(dǎo)無人機(jī)按照指定航線飛行,相當(dāng)于有人機(jī)系統(tǒng)中的領(lǐng)航員。
目前無人機(jī)所采用的導(dǎo)航技術(shù)主要有慣性導(dǎo)航、定位衛(wèi)星導(dǎo)航、地形輔助導(dǎo)航、地磁導(dǎo)航、多普勒導(dǎo)航等。
無人機(jī)載導(dǎo)航系統(tǒng)主要分非自主(GPS等)和自主(慣性制導(dǎo))兩種,但分別有易受干擾和誤差積累增大的缺點(diǎn),而未來無人機(jī)的發(fā)展要求障礙回避、物資或武器投放、自動(dòng)進(jìn)場著陸等功能,需要高精度、高可靠性、高抗干擾性能,因此多種導(dǎo)航技術(shù)結(jié)合的“慣性 + 多傳感器 +GPS+ 光電導(dǎo)航系統(tǒng)”將是未來發(fā)展的方向。
3、動(dòng)力系統(tǒng)
目前民用工業(yè)無人機(jī)以油動(dòng)為主,消費(fèi)級無人機(jī)以電動(dòng)為主。
不同用途的無人機(jī)對動(dòng)力裝置要求也不同。低速、中低空小型無人機(jī)傾向于活塞發(fā)動(dòng)機(jī),低速短距、垂直起降無人機(jī)傾向渦軸發(fā)動(dòng)機(jī),小型民用無人機(jī)則主要采用電動(dòng)機(jī)、內(nèi)燃機(jī)或噴氣發(fā)動(dòng)機(jī)。
渦輪有望逐步取代活塞,新能源發(fā)動(dòng)機(jī)提升續(xù)航能力。
專業(yè)級無人機(jī)目前廣泛采用的動(dòng)力裝置為活塞式發(fā)動(dòng)機(jī),但活塞式只適用于低速低空小型無人機(jī)。隨著渦輪發(fā)動(dòng)機(jī)推重比、壽命不斷提高、油耗降低,渦輪將取代活塞成為無人機(jī)的主力動(dòng)力機(jī)型。
太陽能、氫能等新能源電動(dòng)機(jī)也有望為小型無人機(jī)提供更持久的動(dòng)力。
4、數(shù)據(jù)鏈系統(tǒng)(通信系統(tǒng))
數(shù)據(jù)鏈系統(tǒng)(通信系統(tǒng))是無人機(jī)和控制站之間的橋梁,是無人機(jī)的真正價(jià)值所在。
上行通信鏈路主要負(fù)責(zé)地面站到無人機(jī)的遙控指令的發(fā)送和接收。
下行通信鏈路主要負(fù)責(zé)無人機(jī)到地面站的遙測數(shù)據(jù)、紅外或電視圖像的發(fā)送和接收。
普通無人機(jī)大多采用定制視距數(shù)據(jù)鏈,而中高空、長航時(shí)無人機(jī)則采用超視距衛(wèi)星通信數(shù)據(jù)鏈。
現(xiàn)代數(shù)據(jù)鏈技術(shù)的發(fā)展推動(dòng)者無人機(jī)數(shù)據(jù)鏈向著高速、寬帶、保密、抗干擾的方向發(fā)展。隨著機(jī)載傳感器、定位的精細(xì)程度和執(zhí)行任務(wù)的復(fù)雜程度不斷上升,對數(shù)據(jù)鏈的帶寬提出了很強(qiáng)的要求,未來隨著機(jī)載高速處理器的突飛猛進(jìn),預(yù)計(jì)幾年后現(xiàn)有射頻數(shù)據(jù)鏈的傳輸速率將翻倍,未來可能還將出現(xiàn)激光通訊方式。
智能無人機(jī)的關(guān)鍵基礎(chǔ)技術(shù)
無人機(jī)“視覺”技術(shù)
賦予無人機(jī)“智能”中關(guān)鍵技術(shù)之一是讓無人機(jī)能夠通過機(jī)器視覺感知周邊的環(huán)境,并將結(jié)果轉(zhuǎn)化為數(shù)據(jù)通過OS(操作系統(tǒng))傳給其他應(yīng)用程序。
目前無人機(jī)領(lǐng)域主流的機(jī)器視覺硬件技術(shù)有:雙目機(jī)器視覺、紅外激光視覺、超聲波輔助探測等方式。
1、雙目機(jī)器視覺
雙目機(jī)器視覺基于三角定位原理,與人眼對三維世界的還原原理類似,通過比較兩個(gè)同向攝像頭拍攝的畫面中同一物體的視角差來確定距離,從而從二維圖像中還原出三維世界的立體模型。
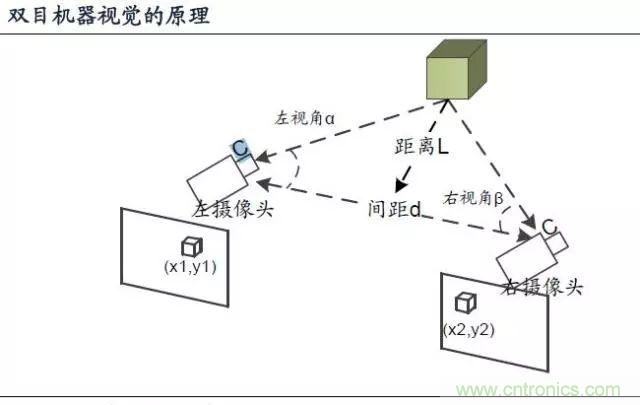
雙目機(jī)器視覺僅需兩個(gè)攝像頭,但對計(jì)算能力的要求較高。
雙目機(jī)器視覺的門檻不在于根據(jù)視角信息α、β和間距d解算距離L,而在于讓計(jì)算機(jī)能夠在畫面中將物體從背景中“提取”出來。目前高通支持雙目機(jī)器視覺的無人機(jī)參考設(shè)計(jì)使用旗艦芯片Snapdragon 801/820,可見其對計(jì)算能力的要求之高。
對人眼來說將一個(gè)物體從背景畫面當(dāng)中區(qū)分開來是一件很自然的事情,但對于計(jì)算機(jī)就不同了:同一景物在不同視點(diǎn)的攝像機(jī)圖像平面上的成像會(huì)發(fā)生不同程度的扭曲和變形,要讓計(jì)算機(jī)模糊分割出物體,圖像分割算法需要做卷積/微分等大計(jì)算量運(yùn)算;而無人機(jī)這種要求實(shí)時(shí)測距的場景下需要的總體計(jì)算性能就更高了。
2、紅外激光視覺
為了規(guī)避計(jì)算機(jī)視覺中識別物體的大量計(jì)算以及提高精度,以Intel為代表的一批廠商使用了紅外激光視覺技術(shù),如Intel RealSense機(jī)器視覺模組。其基本原理見下圖,其測距原理與雙目視覺類似,但識別對象從物體替換成了打在物體表面的紅外激光點(diǎn)。這樣就從根本上消除了物體識別的計(jì)算需求。
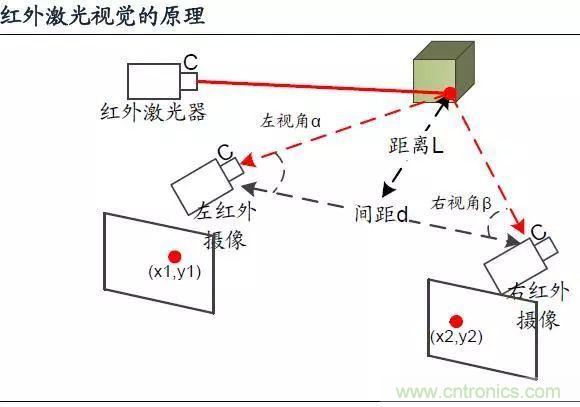
紅外激光視覺的必要代價(jià)是將兩個(gè)攝像頭替換為紅外攝像頭,并增加一個(gè)紅外激光掃描器的硬件成本以及功耗。其中紅外激光掃描器由一個(gè)紅外激光發(fā)射器和MEMS掃描反射鏡組成,整體增加的硬件成本較高。
除了對計(jì)算量要求小以外,紅外激光機(jī)器視覺還具有兩大優(yōu)點(diǎn): 相比雙目,其應(yīng)用時(shí)間與范圍更廣,可在暗夜和照明條件不好的室內(nèi)使用;相比雙目,其有著更高的測距精度,能夠精確還原物體的三維數(shù)據(jù)。
3、超聲波探測
超聲波測障是一種較為成熟的技術(shù),已廣泛使用在軍/民用多種應(yīng)用場合之中。
超聲波的優(yōu)勢在于能夠有效識別玻璃,電線等雙目視覺/紅外激光視覺無法準(zhǔn)備測距的物體。
缺點(diǎn)在于精度較差,只能用于探測障礙是否存在,無法提取精確空間信息用作路徑規(guī)劃。
定點(diǎn)懸停技術(shù)
消費(fèi)級無人機(jī)的核心應(yīng)用就是基于無人機(jī)的航拍功能,而航拍功能對無人機(jī)系統(tǒng)要求最高的技術(shù)指標(biāo)就是飛行的穩(wěn)定性。
懸停定位技術(shù)所采用的技術(shù)手段主要有幾種:
1)GPS/IMU組合定位
2)超聲波輔助定高
3)基于圖像的光流定位技術(shù)
GPS/IMU定位技術(shù)
GPS/IMU定位的原理是較為傳統(tǒng)和成熟的定位方法。
GPS可以測得無人機(jī)當(dāng)前的水平位置和高度,飛控系統(tǒng)根據(jù)無人機(jī)位置和高度相對于懸停點(diǎn)的偏差對無人機(jī)進(jìn)行補(bǔ)償控制從而實(shí)現(xiàn)定點(diǎn)懸停。
然而,GPS信號更新較慢,而且GPS信號容易收到干擾,影響實(shí)際控制效果。因此工程實(shí)踐中引入了飛行器的IMU信息與GPS信號進(jìn)行濾波,得到更為精確和更新率更高的位置、高度信息,這種模式還可以保證在GPS失常時(shí),僅依靠IMU提供應(yīng)急位置高度信息,但是因?yàn)閮H利用IMU信息進(jìn)行位置高度解算時(shí),解算結(jié)果容易發(fā)散,因此這種方法僅適合在空曠的戶外進(jìn)行懸??刂?,而并不適宜在室內(nèi)或有信號遮蔽的環(huán)境下使用。
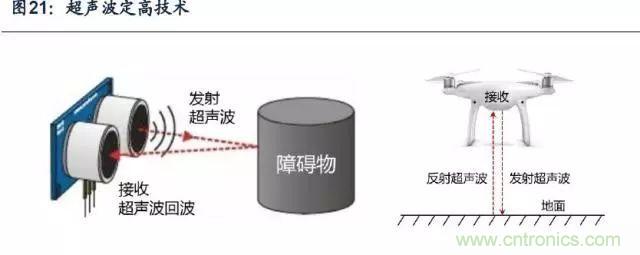
超聲波輔助定高技術(shù)
超聲波測距傳感器是一種較為成熟的測距傳感器,能夠根據(jù)超聲波發(fā)出與返回的時(shí)間差,測得超聲波傳感器前的障礙物的距離,當(dāng)無人機(jī)布置有下視超聲波傳感器時(shí),可測得較為精確的距地面距離,從而輔助實(shí)現(xiàn)定高控制,但是超聲波輔助定高對于水平位置的飄移控制起不到作用。
光流定位
光流定位是采用圖像傳感器對傳感器所捕捉的圖像畫面進(jìn)行分析,間接解算得到自身位置、運(yùn)動(dòng)信息的一種技術(shù)。
隨著圖像處理算法的演進(jìn)和圖像處理硬件平臺的發(fā)展,使得這種算法的精度和實(shí)時(shí)性得到保證,從而得以在無人機(jī)系統(tǒng)上得到應(yīng)用。
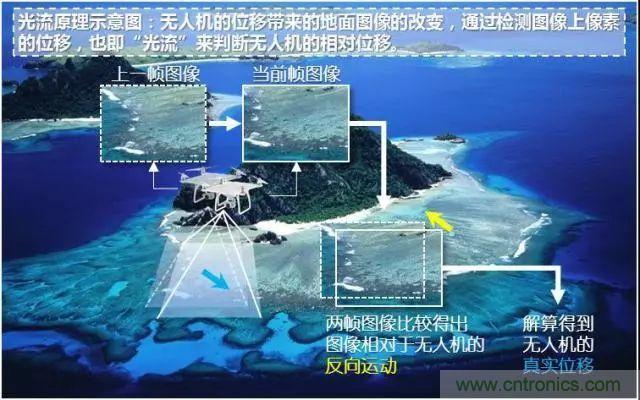
光流定位是利用圖像序列中像素在時(shí)間域上的變化以及相鄰幀之間的相關(guān)性來找到上一幀跟當(dāng)前幀之間存在的對應(yīng)關(guān)系,從而計(jì)算出相鄰幀之間物體的運(yùn)動(dòng)信息的一種方法。一般而言,光流是由于場景中前景目標(biāo)本身的移動(dòng)、相機(jī)的運(yùn)動(dòng),或者兩者的共同運(yùn)動(dòng)所產(chǎn)生的。
在無人機(jī)應(yīng)用中,無人機(jī)機(jī)身加裝對地的光流攝像頭,根據(jù)所觀測到的地面圖像來進(jìn)行定位的,其原理可通過下圖進(jìn)行理解:無人機(jī)在相對地面移動(dòng)時(shí),其對地觀測鏡頭所拍攝到的畫面會(huì)相對向反方向“移動(dòng)”,根據(jù)無人機(jī)距離地面的高度(這也是光流傳感器都與對地超聲波傳感器成對出現(xiàn)的原因)以及對地觀測圖像中像素移動(dòng)的量,即可推算出無人機(jī)相對地面移動(dòng)的距離。
當(dāng)無人機(jī)采用光流定位技術(shù)實(shí)現(xiàn)自身位置確定后,即可采用通用的控制算法實(shí)現(xiàn)水平面和高度上的定位。目前所采用的光流技術(shù),基本上可以實(shí)現(xiàn)室內(nèi)環(huán)境的穩(wěn)定懸停,但是隨著時(shí)間的累積,仍然會(huì)有十幾厘米到幾十厘米范圍的飄移。不過,這種低頻率、小幅度的位置改變對于航拍來說,是可以接受的。
跟蹤拍攝技術(shù)
對于航拍無人機(jī)來說,一個(gè)新的趨勢是采用跟蹤拍攝模式,即對無人機(jī)設(shè)置一個(gè)興趣點(diǎn),無人機(jī)則自動(dòng)對興趣點(diǎn)進(jìn)行跟蹤拍攝,這是無人機(jī)智能化的發(fā)展趨勢。
目前的跟蹤拍攝技術(shù)主要分為兩種:
1)GPS跟蹤;
2)圖像跟蹤。
GPS跟蹤
GPS跟蹤技術(shù)較為簡單,即被跟蹤者需手持遙控器,并獲得自己當(dāng)前位置的衛(wèi)星定位信息,之后將此信息發(fā)送給無人機(jī),無人機(jī)以接收到的目標(biāo)位置作為目標(biāo),并進(jìn)行導(dǎo)航。
GPS跟蹤是一種比較初級的跟蹤的方式,市場上大部分無人機(jī)均采用這種方式。
圖像跟蹤(包括臉部識別跟蹤)
圖像跟蹤技術(shù)是無人機(jī)根據(jù)所設(shè)置的興趣點(diǎn)的圖像特征,完全根據(jù)圖像信息完成目標(biāo)的跟蹤,這涉及到了對目標(biāo)對象的圖像識別、圖像跟蹤,尤其是在目標(biāo)運(yùn)動(dòng)場景中,圖像背景變化較、目標(biāo)形態(tài)變化較大的情況下,對目標(biāo)準(zhǔn)確的跟蹤需要運(yùn)用到深度學(xué)習(xí)技術(shù),是當(dāng)前人工智能的一個(gè)熱點(diǎn)研究方向。
自動(dòng)避障技術(shù)
無人機(jī)的飛行安全一直是關(guān)系到無人機(jī)大規(guī)模商業(yè)應(yīng)用的核心問題,如何感知到障礙物、并且自主的規(guī)避障礙物是無人機(jī)飛行安全領(lǐng)域最前沿的研究課題。
隨著無人機(jī)的自主飛行、跟蹤飛行的大規(guī)模商業(yè)應(yīng)用,無人機(jī)在自主航拍、跟拍的過程中對自主避障的功能要求變得更加迫切。
目前主要采用3種不同的避障技術(shù):
1)基于超聲波探測的避障;
2)基于激光雷達(dá)的壁障技術(shù);
3)Realsense單目+結(jié)構(gòu)光探測避障。
超聲波測距避障
這種技術(shù)類似于傳統(tǒng)的倒車?yán)走_(dá)系統(tǒng),根據(jù)超聲波探測,獲知障礙物距離信息,然后采用相應(yīng)策略避開障礙物,其特點(diǎn)是探測距離近,探測范圍小,但是方法非常成熟,實(shí)現(xiàn)容易。
雙目視覺避障
這種技術(shù)是基于雙目視覺的圖像景深重構(gòu)方法,對視場內(nèi)的景物進(jìn)行景深重構(gòu),通過景深信息來判斷視場內(nèi)的障礙物情況,探測范圍更廣、距離更遠(yuǎn),相應(yīng)安全性更高,但是技術(shù)難度大,而且會(huì)受到光照強(qiáng)弱變化的影響。

基于激光雷達(dá)的避障技術(shù)
這種技術(shù)依靠的是無人汽車上應(yīng)用較多的激光雷達(dá)技術(shù)對無人機(jī)周邊的環(huán)境進(jìn)行掃描,并進(jìn)行地圖建模。
Realsense單目+結(jié)構(gòu)光探測避障
RealSense是Intel公司早先發(fā)布的視覺感知系統(tǒng)。它采用了“主動(dòng)立體成像原理”,模仿了人眼的“視差原理”,通過打出一束紅外光,以左紅外傳感器和右紅外傳感器追蹤這束光的位置,然后用三角定位原理來計(jì)算出3D 圖像中的“深度”信息。通過配有深度傳感器和全1080p彩色鏡頭,能夠精確識別手勢動(dòng)作、面部特征、前景和背景,進(jìn)而讓設(shè)備理解人的動(dòng)作和情感。據(jù)Intel方面對外透露的數(shù)據(jù),Realsense的有效測距可達(dá)10米。
無線圖像傳輸技術(shù)
無人機(jī)航拍的核心技術(shù)之一就是無線圖像傳輸,傳輸?shù)哪芰Υ笮∈菍o人機(jī)航拍能力衡量的一個(gè)重要因素。
無人機(jī)航拍技術(shù)
無人機(jī)航拍技術(shù)其實(shí)可以簡單地按照字面的“無人機(jī)”+“航拍”拆分為2點(diǎn):
1、影像拍攝技術(shù),也即成像以及圖像處理技術(shù);比如像素?cái)?shù)、光圈大小等,但是攝像頭模組上影響成像質(zhì)量的參數(shù)還有許多:單個(gè)像素尺寸、傳感器技術(shù)、鏡片組技術(shù)、ISP技術(shù)等。
2、無人機(jī)平臺技術(shù),主要指為航拍提供穩(wěn)定的航拍環(huán)境的機(jī)身控制技術(shù)。
影像拍攝技術(shù):目前市場上的影像拍攝方案,都是對幾個(gè)大品牌主流的攝像頭模組的集成應(yīng)用,無人機(jī)生產(chǎn)廠商在這一方面沒有太多的技術(shù)空間,而且因?yàn)榧夹g(shù)發(fā)展已經(jīng)比較成熟,不同產(chǎn)品方案之間差距并不大。
無人機(jī)機(jī)載平臺穩(wěn)定技術(shù):是指除了飛行導(dǎo)航、控制等無人機(jī)自身飛行技術(shù)以外,為無人機(jī)實(shí)現(xiàn)穩(wěn)定航拍平臺保障的相關(guān)技術(shù)。這種技術(shù)是影響到成像質(zhì)量最關(guān)鍵的因素。
穩(wěn)定的拍攝平臺的意義:
在拍攝視頻時(shí),畫面的抖動(dòng)、傾斜都會(huì)嚴(yán)重影響畫面的流暢度和美觀度;
在拍攝照片時(shí),尤其是弱光情況下,如果曝光時(shí)間較長,機(jī)身的抖動(dòng)會(huì)引起畫面的模糊;若減少曝光時(shí)間,則需要提高感光度,噪點(diǎn)增多,影響畫質(zhì)。因此,機(jī)身的穩(wěn)定對于拍攝來說至關(guān)重要。
影響機(jī)身穩(wěn)定的主要因素:
按照當(dāng)前四旋翼無人機(jī)的典型情況,可以將對于機(jī)身位置、姿態(tài)造成擾動(dòng)的幾個(gè)因素歸結(jié)如下:
1、懸停定位不精確造成的水平位置以及高度的飄逸;
2、機(jī)體作動(dòng)時(shí)的機(jī)身傾斜與抖動(dòng);
3、電機(jī)震動(dòng)、突風(fēng)等帶來的干擾。對于不同類型的擾動(dòng),無人機(jī)系統(tǒng)上采取了不同的策略進(jìn)行應(yīng)對。
對于水平以及高度的飄移,在室外,也即GPS信號良好的情況下,無人機(jī)會(huì)主要根據(jù)GPS信號進(jìn)行定位。但是限于民用GPS系統(tǒng)自身的精度有限且更新頻率較低,單純依靠GPS系統(tǒng)進(jìn)行定位較為困難,通常無人機(jī)還會(huì)引入慣性模組進(jìn)行組合定位。
當(dāng)處于室內(nèi)或者GPS信號接收受限的情況下,無人機(jī)系統(tǒng)還采用對地?cái)z像頭進(jìn)行光流定位。光流定位是一項(xiàng)近年來興起的基于圖像的定位方式,在距離地面較近時(shí),使用效果良好。

如果說位置的飄移屬于慢動(dòng)態(tài)的擾動(dòng),那么無人機(jī)機(jī)動(dòng)時(shí)所引起的機(jī)體傾斜、抖動(dòng)則是高頻擾動(dòng)因素,對于畫面的影響十分顯著。
當(dāng)無人機(jī)需要進(jìn)行位置移動(dòng)時(shí),四旋翼機(jī)身姿態(tài)必須做出較大調(diào)整,尤其是在機(jī)動(dòng)剛發(fā)生時(shí),機(jī)身姿態(tài)出現(xiàn)了40度的調(diào)整。
對于機(jī)身在水平方向移動(dòng)時(shí)所帶來的機(jī)體傾斜,以及機(jī)體作動(dòng)時(shí)的抖動(dòng)等干擾因素,對圖像拍攝效果影響較大,必須通過掛載穩(wěn)定云臺抵消影響。
對于電機(jī)震動(dòng)、突風(fēng)擾動(dòng)等因素,考慮到其屬于較高頻擾動(dòng),可采用空心橡膠球彈簧進(jìn)行高頻震動(dòng)濾除,即可取得較好的效果。對于突風(fēng)等干擾,由于其形式、大小均存在較大的隨機(jī)性,很難保證完全消除影響,只能考慮結(jié)合云臺、光流等多種形式對其影響進(jìn)行抑制。

最后,不能忽略的一個(gè)技術(shù)是電子穩(wěn)像技術(shù)。電子穩(wěn)像技術(shù)是在不借助機(jī)械設(shè)備的前提下,通過傳感器,感受機(jī)體運(yùn)動(dòng),從而在顯示畫面上對圖像進(jìn)行剪裁、拼接的修正,從軟件的角度,一定程度上實(shí)現(xiàn)了圖像穩(wěn)定的意圖。
云臺技術(shù)
云臺對于抑制機(jī)身的主動(dòng)傾側(cè)、被動(dòng)干擾等影響航拍效果的擾動(dòng)起到了重大作用。
一般說的機(jī)載云臺通常都是三軸云臺。如下圖所示,三軸云臺的“三軸”分為俯仰、偏航、滾轉(zhuǎn)三個(gè)軸,也稱三個(gè)自由度,分別有一個(gè)電機(jī)進(jìn)行控制。也即攝像頭在三自由度云臺的框架上通過電機(jī)的控制,可以實(shí)現(xiàn)與無人機(jī)三個(gè)自由度的解耦(值無人機(jī)的:俯仰、偏航、滾轉(zhuǎn)三個(gè)自由度),起到隔離、抵消無人機(jī)運(yùn)動(dòng)影響的作用。
三軸云臺技術(shù)主要包含部分內(nèi)容:1、運(yùn)動(dòng)敏感;2、抵消控制。
運(yùn)動(dòng)敏感:需要安裝在最內(nèi)層的攝像頭部分能夠感知到攝像頭的姿態(tài)偏差。通常會(huì)安裝一個(gè)三自由度陀螺儀。
抵消控制:即當(dāng)敏感到攝像頭要偏離設(shè)定的姿態(tài)(一般是水平狀態(tài))時(shí),通過電機(jī)施加反向的運(yùn)動(dòng),抵消運(yùn)動(dòng)變化。
從以上角度來看,傳感器的精度、頻率以及電機(jī)輸出的精度、功率大小,控制算法的性能都對最終效果起到比較大的影響。不過從目前的產(chǎn)品技術(shù)來看,只要配備了三軸云臺的無人機(jī)在航拍方面基本不存在太大使用感受上的區(qū)別。
單從功能上來說,比較關(guān)鍵的幾個(gè)因素是1、云臺與機(jī)身隔離度的高低;2、云臺可控的角度范圍;3、響應(yīng)的快慢;4、精度的高低。

云臺對于航拍的重要性
位移補(bǔ)償:即使采取了較好的GPS+光流定位技術(shù),無人機(jī)在定位懸停拍攝時(shí),還是會(huì)出現(xiàn)較大幅度的飄移,幅度大概為0.3m左右,當(dāng)發(fā)生位移后,畫面中心會(huì)有那么為了進(jìn)一步保證畫面的穩(wěn)定,就必須引入機(jī)械云臺對畫面進(jìn)行穩(wěn)定。
通過簡單的幾何計(jì)算可以看出,當(dāng)相距被拍攝物體距離較近時(shí),水平飄移對畫面影響較大。但是當(dāng)距離被拍攝物體較遠(yuǎn)時(shí),影響較小。這時(shí),僅需要云臺偏轉(zhuǎn)較小的度數(shù)既可修正畫面偏移,使得被拍攝物體重新回到畫面中心。
姿態(tài)補(bǔ)償:相比于無人機(jī)位置的移動(dòng),無人機(jī)自身姿態(tài)的擾動(dòng)對畫面影響更為劇烈。當(dāng)相距被拍攝物體距離較近或較遠(yuǎn)時(shí),影響均較大。
超遠(yuǎn)程操控?zé)o人機(jī)技術(shù)
你可以坐在電腦前,然后只需輕點(diǎn)一下鼠標(biāo),便能夠讓無人機(jī)出動(dòng)到達(dá)另一個(gè)領(lǐng)空甚至是國度。
原理其實(shí)很簡單,整套系統(tǒng)需要有兩個(gè)4G接入點(diǎn),一個(gè)接入點(diǎn)在無人機(jī)上,另一個(gè)在控制器上。PC通過無線網(wǎng)絡(luò)連接向無人機(jī)發(fā)出指令,控制無人機(jī)的飛行路線,同時(shí)無人機(jī)會(huì)將內(nèi)置的攝像頭拍攝的高清視頻發(fā)送給用戶,用戶在監(jiān)控周圍環(huán)境的同時(shí),可調(diào)整無人機(jī)的飛行路線。
本文轉(zhuǎn)載自傳感器技術(shù)mp。
推薦閱讀:




