

【導(dǎo)讀】隨著我國(guó)的發(fā)展,國(guó)家不斷加大在公路、軌道交通等基礎(chǔ)設(shè)施方面的投資力度,極大的推動(dòng)了工程機(jī)械的信息化和智能化。無(wú)線(xiàn)遙控技術(shù)作為信息化的一個(gè)重要方面,也為操作人員使用工程機(jī)械提供了便利和安全保障。

工程車(chē)輛是一個(gè)建筑工程的主干力量,由于它們的出現(xiàn)才使建筑工程的進(jìn)度倍增,減少了人工作業(yè)的工作量。縱觀工程車(chē)作業(yè),會(huì)讓人不由慨嘆機(jī)器與科技的威力。它們用于工程的運(yùn)載,挖掘,搶修,甚至作戰(zhàn)等。常見(jiàn)工程車(chē)有:重型運(yùn)輸車(chē)輛、大型吊車(chē)、挖掘機(jī)、推土機(jī)、壓路機(jī)、裝載車(chē)、電力搶修車(chē)、工程搶險(xiǎn)車(chē)、裝甲工程車(chē)(戰(zhàn)斗工程車(chē))、氧化劑污水處理工程車(chē)等。
經(jīng)過(guò)多年的發(fā)展,工程機(jī)械的制造技術(shù)已經(jīng)相對(duì)成熟,各企業(yè)的產(chǎn)品大同小異。在此背景下,一些企業(yè)開(kāi)始將目光轉(zhuǎn)向工程機(jī)械產(chǎn)品的信息化和智能化領(lǐng)域。無(wú)線(xiàn)遙控技術(shù)作為信息化的一個(gè)重要方面,不僅可以提升產(chǎn)品的競(jìng)爭(zhēng)力,同時(shí)也為操作人員使用工程機(jī)械提供了便利和安全保障。

一、為什么要用無(wú)線(xiàn)遙控?
當(dāng)前工程車(chē)輛主要有兩大缺點(diǎn):
?。?)工作環(huán)境惡劣:工程機(jī)械的施工對(duì)象通常為重型建材(鋼筋、混凝土、石料及泥沙等),在福島核電站事故救援中甚至還存在放射性威脅,因此工程機(jī)械的作業(yè)環(huán)境一般較為惡劣,嚴(yán)重時(shí)會(huì)造成生命和財(cái)產(chǎn)損失。
?。?)操作空間狹?。寒?dāng)前工程機(jī)械的操作大多數(shù)是由作業(yè)人員在駕駛室內(nèi)對(duì)控制面板進(jìn)行操作,由于駕駛室環(huán)境封閉、視野狹小,很難對(duì)整個(gè)施工現(xiàn)場(chǎng)的狀況有清楚的全局把握,當(dāng)出現(xiàn)機(jī)械臂或其他物體遮擋住作業(yè)人員與施工地點(diǎn)之間的視線(xiàn)時(shí),容易降低施工效率,若加之現(xiàn)場(chǎng)指揮配合不當(dāng),嚴(yán)重時(shí)甚至導(dǎo)致施工事故的發(fā)生。

因此,無(wú)線(xiàn)遙控技術(shù)的應(yīng)用可以徹底解決上述問(wèn)題,使作業(yè)人員不必受駕駛室的約束,可以自由地在施工現(xiàn)場(chǎng)走動(dòng)觀察并對(duì)工程機(jī)械進(jìn)行遙控,從而提高作業(yè)效率和安全性。無(wú)線(xiàn)遙控正成為在危險(xiǎn)與惡劣的工作環(huán)境作業(yè)不可替代的設(shè)備。
二、工程車(chē)輛無(wú)線(xiàn)遙控的快速解決方案
對(duì)于一般的工程機(jī)械來(lái)說(shuō),都必須包括動(dòng)力系統(tǒng)、傳動(dòng)系統(tǒng)、底盤(pán)行走系統(tǒng)、操作控制系統(tǒng)和執(zhí)行系統(tǒng)這五大基本系統(tǒng)(如圖所示)。
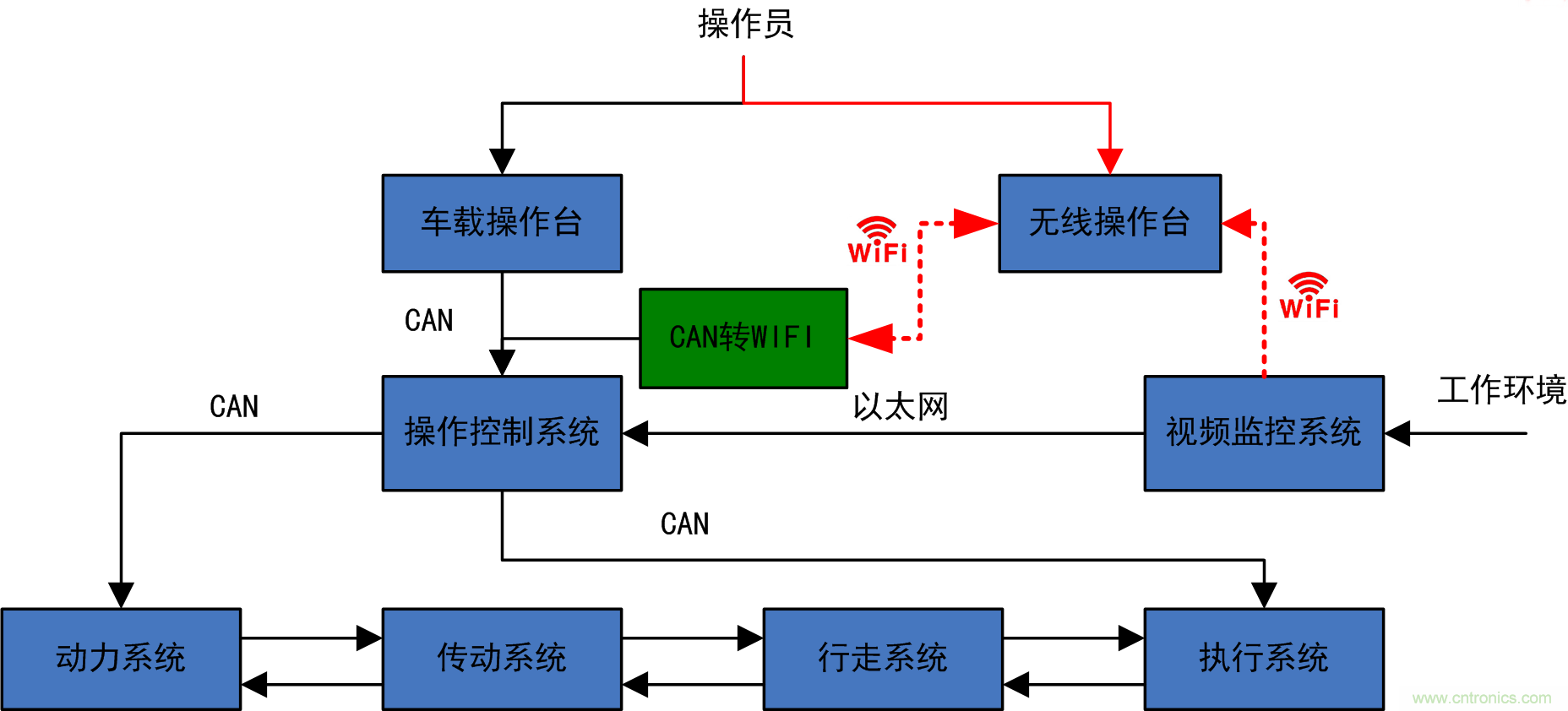
動(dòng)力系統(tǒng)主要采用的是柴油發(fā)動(dòng)機(jī),其原因是由于它具有燃料經(jīng)濟(jì)性好、功率大等優(yōu)點(diǎn);工程機(jī)械的傳動(dòng)系統(tǒng)主要類(lèi)型包括機(jī)械傳動(dòng)、液力機(jī)械傳動(dòng)、液壓傳動(dòng)和電傳動(dòng)等四種形式;底盤(pán)行走系統(tǒng)主要有輪式和履帶式兩種類(lèi)型,此外還有步履帶式行走機(jī)構(gòu)等。操縱控制系統(tǒng)一般包括底盤(pán)操縱系統(tǒng)和工作裝置操縱系統(tǒng)兩個(gè)部分;執(zhí)行系統(tǒng)主要包括各種類(lèi)型的工作裝置和機(jī)構(gòu),其類(lèi)型多種多樣。
在五大基本系統(tǒng)中,最關(guān)鍵的是操作控制系統(tǒng),是工程車(chē)輛的“大腦”。傳統(tǒng)的工程車(chē)輛操作臺(tái)與操作控制系統(tǒng)之間采用CAN通訊,一般的控制器都有CAN接口。因此,要實(shí)現(xiàn)工程車(chē)輛的無(wú)線(xiàn)遙控,只要將CAN通訊轉(zhuǎn)為無(wú)線(xiàn)通訊即可。用致遠(yuǎn)電子自主研發(fā)的CANWIFI-200T模塊可以實(shí)現(xiàn)將CAN通訊轉(zhuǎn)為WIFI通訊,可快速實(shí)現(xiàn)無(wú)線(xiàn)遙控,并且控制器內(nèi)部無(wú)需更改。

為什么要用CAN轉(zhuǎn)WIFI?WIFI通訊相對(duì)于ZIGBEE,433等無(wú)線(xiàn)通訊方式在傳輸速率方面具有無(wú)與倫比的優(yōu)勢(shì)。工程車(chē)輛車(chē)身高、體積大,即使實(shí)現(xiàn)無(wú)線(xiàn)遙控,操作員在地面觀察還是存在盲區(qū),對(duì)于車(chē)輛的操作存在很多的不便。所以實(shí)現(xiàn)無(wú)線(xiàn)遙控后需要加視頻監(jiān)控系統(tǒng),將視頻信息傳輸?shù)綗o(wú)線(xiàn)控制臺(tái),以便操作員對(duì)工程車(chē)輛位置和機(jī)械動(dòng)作的全方位監(jiān)控,更安全,更可靠。而無(wú)線(xiàn)傳輸視頻最好的方式,就是通過(guò)WIFI傳輸。

三、無(wú)線(xiàn)遙控的優(yōu)點(diǎn)
?、俟?jié)省了人力資源:以橋式起重機(jī)為例:操作、系纜、掛卸可由一人單獨(dú)承擔(dān),無(wú)需指揮。
?、?提高了工作效率:操作人員獨(dú)立判斷,操作的準(zhǔn)確性、連貫性比以往得以顯著提高;避免了操作員在高溫情況駕駛室溫度較高,身體不適而造成的工作效率不高。
③ 改善了操作環(huán)境:操作人員可選擇最佳角度,避開(kāi)能見(jiàn)度差、污染嚴(yán)重的操作位置;杜絕操作員受有害氣體的侵害。
?、?提高了安全性可靠性:由于省去了指揮環(huán)節(jié),從而避免了由于指揮不當(dāng)引起的誤解;操作員可以在指揮的角度操作,更直觀的看清被吊裝物品現(xiàn)場(chǎng)情況,另外避免塔型吊車(chē)操作員在惡劣天氣下駕駛室內(nèi)不安全性,以及操作員高空作業(yè)與指揮員溝通有誤而造成不必要的事故。
⑤ 減少了制造與維修成本:遙控系統(tǒng)取代駕駛室早已成為現(xiàn)實(shí),并已成為標(biāo)準(zhǔn)生產(chǎn)工藝。

四、CANWiFi-200T轉(zhuǎn)換器介紹
CANWiFi-200T轉(zhuǎn)換器可以實(shí)現(xiàn)CAN-bus數(shù)據(jù)和WiFi數(shù)據(jù)相互傳輸?shù)墓δ埽鼉?nèi)部集成了2路的CAN-bus 接口、1路WLAN接口和1路LAN接口,并自帶TCP/IP或者UDP協(xié)議棧,用戶(hù)利用它可以輕松完成CAN-bus網(wǎng)絡(luò)和WiFi網(wǎng)絡(luò)的互連互通,輕松實(shí)現(xiàn)工程車(chē)輛的無(wú)線(xiàn)遙控。

CANWiFi-200T產(chǎn)品為工業(yè)級(jí)產(chǎn)品,可以工作在-40℃~85℃的溫度范圍內(nèi)。具有TCP Server、TCP Client、UDP等多種工作模式,支持254個(gè)TCP連接或多達(dá)6×254個(gè)UDP“連接”。
推薦閱讀:



