
【導讀】鋰離子電池充電器通常采用恒流(CC) - 恒壓(CV)充電曲線。充電過程會經(jīng)歷幾個不同的階段,在確保電池容量充滿的同時要符合特定的安全規(guī)則。文中將舉例說明如何使用鋰離子技術來實現(xiàn)電池充電器。
CC-CV曲線包括以下幾個階段:
1. 預充
2. 激活
3. 恒流
4. 恒壓
充電開始為預充階段,以檢查電池狀況是否良好。在此階段中,通常給電池提供電池容量5%到15%的少量電流,如果電池電壓上升到2.8V以上,則認為電池狀況良好,可以進入到激活階段。在此階段中,給電池提供相同的電流,但會持續(xù)更長的時間。當電池電壓上升到3V以上,則啟動快充,并提供等于或低于電池容量的恒定電流。
當電池電壓上升到完全充電電壓(4.2V) 時或出現(xiàn)超時情況(不管哪一種情況先出現(xiàn)),恒流階段結束。電池電壓到達完全充電電壓時,充電進入到恒壓階段,且電池電壓保持恒定。要做到這一點,充電電流必須隨著時間的推移而降低。這一階段的充電過程相比于其它充電階段而言所需的時間最長。在這個過程中,當充電電流降到“結束電流”限度以下,通常為電池容量的2%,則電池充滿,充電過程結束。請注意,充電過程中每個階段都有一個時間限制,這是一個重要的安全特性。
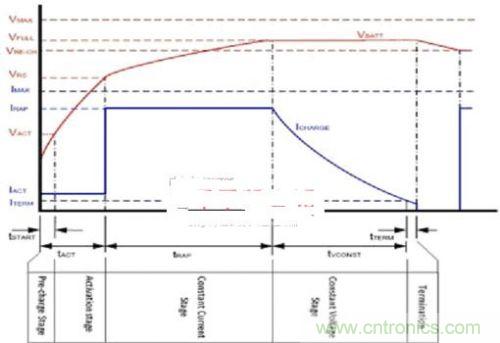
圖1:鋰離子電池充電曲線
為了實施這一充電曲線,必須隨時了解電池電壓和充電電流。此外,還要檢查電池的溫度。因為在充電時,電池往往會變熱。如果溫度超過電池的規(guī)定限額,就可能對電池造成損害。
就電池充電器的實現(xiàn)方案而言,用戶可有兩個選擇。一是采用專門的電池充電器IC,二是采用更加通用的微控制器。第一種方案能快速解決問題,但其可配置性和用戶界面選項(LED指示燈)有限。第二種方案采用微控制器,設計的時間會稍微長一些,但能提供可配置性選項,并且還能集成其它功能,如電池充電狀態(tài)(SOC)計算以及通過通訊接口向系統(tǒng)中的主機處理器發(fā)送信息等。此外,微控制器不能提供充電器所必需的電源電路系統(tǒng),而且還需要外部BJT或MOSFET。不過這些電源組件的成本相比于微控制器或專門的充電器IC 而言要低得多。
充電器架構
我們從充電曲線可以看出,單節(jié)鋰離子電池充電器需要可控的電流源。電流源輸出應當根據(jù)電池狀態(tài)而改變??紤]到上述要求,基于微控制器的實施方案需要以下功能模塊:
1. 電流控制電路
2. 電池參數(shù)(電壓、電流、溫度)測量電路
3. 充電算法(用于實現(xiàn)CC-CV充電曲線)
方案框圖如下所示:
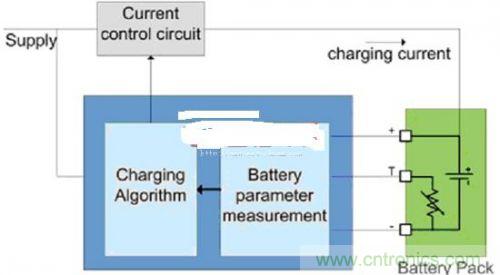
圖2:鋰離子電池充電器框圖
電流控制電路可采用電壓源和電流反饋技術進行構建。其工作原理類似于典型的負反饋控制系統(tǒng)。允許充電電流通過小電阻以獲得反饋,從而產(chǎn)生一定的電壓。
[page]
電壓源可采用兩種方法進行創(chuàng)建:
1. 線性拓撲結構
2. 開關:降壓或升壓拓撲結構
線性拓撲結構采用線性模式的串聯(lián)導通元件(BJT或MOSFET),如圖3所示。
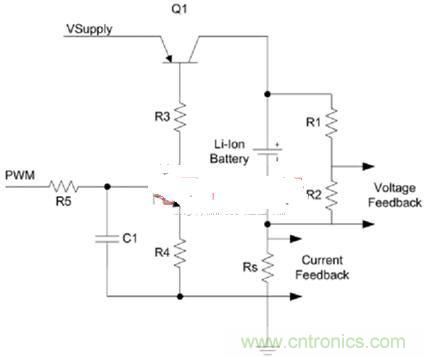
圖3:線性拓撲結構
通過控制串聯(lián)導通晶體管Q1的偏置實現(xiàn)對充電電流的控制??墒褂脭?shù)模轉換器(ADC)或脈寬調(diào)制器(PWM)配合外部RC低通濾波器來控制偏置。線性方法適用于充電電流(<1A)較低的情況,因為串聯(lián)導通元件會面臨功率消耗問題。
開關拓撲結構本身具有低功耗的優(yōu)勢,能實現(xiàn)較高的充電電流?;陂_關降壓調(diào)節(jié)器的充電器如圖4所示。
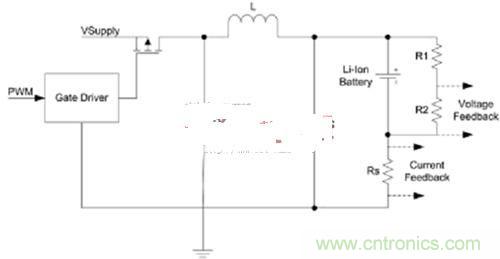
圖4:開關降壓調(diào)節(jié)器拓撲結構
充電電流由驅動MOSFET的PWM占空比而設定。
電池參數(shù)測量電路:反饋信號需要使用ADC進行測量,目前大多數(shù)微控制器均可提供ADC外設。在圖3和圖4中,我們看到了如何獲取電池電壓和電流反饋。然而,這些差分信號需要差分ADC進行測量,而通常在微控制器中采用的是單端ADC。圖4和圖5所示的電路通過讓微控制器接地和電源接地不同,可方便地加以修改,從而為電壓、電流和溫度等所有3個參數(shù)生成單端信號。
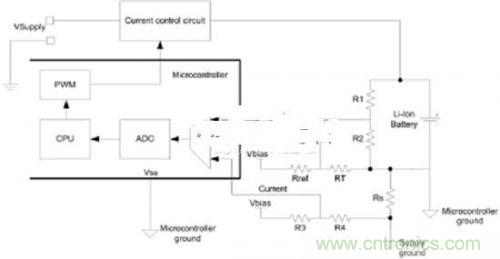
圖5:采用單端ADC進行測量
電池負端可作為微控制器接地,這就讓電壓、溫度和電流反饋可參考微控制器接地,并能進行單端ADC測量。對于電流反饋而言,正偏移電壓需要引入,而反饋電壓在電池充電時將為負。如圖5所示,電阻R3和R4提供了所需的偏移電壓。
充電算法:這一行為將結束環(huán)路。CPU讀取ADC以獲取電壓、充電電流和溫度讀數(shù),并根據(jù)充電曲線控制PWM占空比。CPU監(jiān)控ADC結果與控制PWM的速度取決于環(huán)路響應時間和CPU帶寬消耗二者之間如何平衡。
ADC參數(shù)和PWM分辨率:ADC分辨率和精確度以及PWM分辨率是在設計電池充電器時應考慮到的重要參數(shù)。ADC分辨率定義了輸入電壓測量的精度(這里是指反饋電壓)。PWM分辨率則定義了改變輸出信號占空比的精度,這進而又決定了電流控制電路的輸出電壓。鋰離子電池充電時,電池電壓需要實現(xiàn)準確和高精度的控制。當電池電壓接近充滿狀態(tài)時,這一點就顯得尤為重要??煽匦匀Q于ADC分辨率、測量的準確度以及占空比變化的細粒度。
圖5給出了采用賽普拉斯CY8C24x23 PSoC器件實施的充電器架構示例。微控制器與通用數(shù)字和模擬模塊配合使用,可配置為特定的電路功能。舉例來說,持續(xù)時間模擬模塊可用來實施可編程增益放大器和比較器。開關電容模擬模塊則有多種不同用途,包括濾波器、數(shù)模轉換器(DAC)和模數(shù)轉換器(ADC) 等。數(shù)字基礎模塊可用來實施PWM、計數(shù)器、定時器和緩沖器,而數(shù)字通訊模塊則可用來實施SPI、UART、IrDA RX和TX等通信接口。此外,該器件還可提供I2C模塊,可用作為主設備或從設備。
圖6所示為單節(jié)電池充電器應用的器件資源消耗情況,我們看到還有足夠的數(shù)字和模擬模塊能夠實施其它有用的功能,這就為系統(tǒng)提供了更多的集成選項,從而有助于降低系統(tǒng)成本和大小。
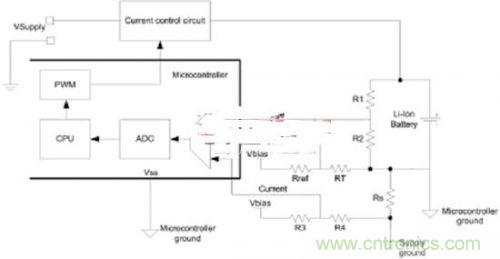
圖6:采用PSoC 1 (CY8C24x23)的實施方案



