
【導讀】機器視覺系統(tǒng)的特點是提高生產(chǎn)的柔性和自動化程度。在一些不適合于人工作業(yè)的危險工作環(huán)境或人工視覺難以滿足要求的場合,常用機器視覺來替代人工視覺;同時在大批量工業(yè)生產(chǎn)過程中,用人工視覺檢查產(chǎn)品質量效率低且精度不高,用機器視覺檢測方法可以大大提高生產(chǎn)效率和生產(chǎn)的自動化程度。而且機器視覺易于實現(xiàn)信息集成,是實現(xiàn)計算機集成制造的基礎技術。
機器視覺是人工智能正在快速發(fā)展的一個分支。簡單說來,機器視覺就是用機器代替人眼來做測量和判斷。機器視覺系統(tǒng)是通過機器視覺產(chǎn)品(即圖像攝取裝置,分CMOS和CCD兩種)將被攝取目標轉換成圖像信號,傳送給專用的圖像處理系統(tǒng),得到被攝目標的形態(tài)信息,根據(jù)像素分布和亮度、顏色等信息,轉變成數(shù)字化信號;圖像系統(tǒng)對這些信號進行各種運算來抽取目標的特征,進而根據(jù)判別的結果來控制現(xiàn)場的設備動作。
發(fā)展
如今,中國正成為世界機器視覺發(fā)展最活躍的地區(qū)之一,應用范圍涵蓋了工業(yè)、農(nóng)業(yè)、醫(yī)藥、軍事、航天、氣象、天文、公安、交通、安全、科研等國民經(jīng)濟的各個行業(yè)。其重要原因是中國已經(jīng)成為全球制造業(yè)的加工中心,高要求的零部件加工及其相應的先進生產(chǎn)線,使許多具有國際先進水平的機器視覺系統(tǒng)和應用經(jīng)驗也進入了中國。
經(jīng)歷過長期的蟄伏,2010年中國機器視覺市場迎來了爆發(fā)式增長。數(shù)據(jù)顯示當年,中國機器視覺市場規(guī)模達到8.3億元,同比增長48.2%,其中智能相機、軟件、光源和板卡的增長幅度都達到了50%,工業(yè)相機和鏡頭也保持了40%以上的增幅,皆為2007年以來的最高水平。
工作原理
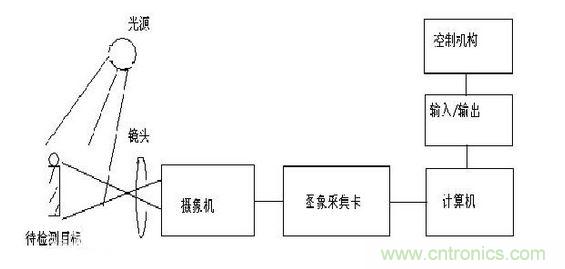
機器視覺檢測系統(tǒng)采用CCD照相機將被檢測的目標轉換成圖像信號,傳送給專用的圖像處理系統(tǒng),根據(jù)像素分布和亮度、顏色等信息,轉變成數(shù)字化信號,圖像處理系統(tǒng)對這些信號進行各種運算來抽取目標的特征,如面積、數(shù)量、位置、長度,再根據(jù)預設的允許度和其他條件輸出結果,包括尺寸、角度、個數(shù)、合格 / 不合格、有 / 無等,實現(xiàn)自動識別功能。
概述
機器視覺系統(tǒng)的特點是提高生產(chǎn)的柔性和自動化程度。在一些不適合于人工作業(yè)的危險工作環(huán)境或人工視覺難以滿足要求的場合,常用機器視覺來替代人工視覺;同時在大批量工業(yè)生產(chǎn)過程中,用人工視覺檢查產(chǎn)品質量效率低且精度不高,用機器視覺檢測方法可以大大提高生產(chǎn)效率和生產(chǎn)的自動化程度。而且機器視覺易于實現(xiàn)信息集成,是實現(xiàn)計算機集成制造的基礎技術。
典型結構
一個典型的機器視覺系統(tǒng)包括以下五大塊:
照明
照明是影響機器視覺系統(tǒng)輸入的重要因素,它直接影響輸入數(shù)據(jù)的質量和應用效果。由于沒有通用的機器視覺照明設備,所以針對每個特定的應用實例,要選擇相應的照明裝置,以達到最佳效果。光源可分為可見光和不可見光。常用的幾種可見光源是白熾燈、日光燈、水銀燈和鈉光燈??梢姽獾娜秉c是光能不能保持穩(wěn)定。如何使光能在一定的程度上保持穩(wěn)定,是實用化過程中急需要解決的問題。另一方面,環(huán)境光有可能影響圖像的質量,所以可采用加防護屏的方法來減少環(huán)境光的影響。照明系統(tǒng)按其照射方法可分為:背向照明、前向照明、結構光和頻閃光照明等。其中,背向照明是被測物放在光源和攝像機之間,它的優(yōu)點是能獲得高對比度的圖像。前向照明是光源和攝像機位于被測物的同側,這種方式便于安裝。結構光照明是將光柵或線光源等投射到被測物上,根據(jù)它們產(chǎn)生的畸變,解調出被測物的三維信息。頻閃光照明是將高頻率的光脈沖照射到物體上,攝像機拍攝要求與光源同步。
鏡頭
FOV(Field of Vision)=所需分辨率*亞象素*相機尺寸/PRTM(零件測量公差比)
鏡頭選擇應注意:
①焦距②目標高度 ③影像高度 ④放大倍數(shù) ⑤影像至目標的距離 ⑥中心點 /節(jié)點⑦畸變
視覺檢測中如何確定鏡頭的焦距
為特定的應用場合選擇合適的工業(yè)鏡頭時必須考慮以下因素:
· 視野 - 被成像區(qū)域的大小。
· 工作距離 (WD) - 攝像機鏡頭與被觀察物體或區(qū)域之間的距離。
· CCD - 攝像機成像傳感器裝置的尺寸。
· 這些因素必須采取一致的方式對待。如果在測量物體的寬度,則需要使用水平方向的 CCD 規(guī)格,等等。如果以英寸為單位進行測量,則以英尺進行計算,最后再轉換為毫米。
參考如下例子:有一臺 1/3” C 型安裝的 CCD 攝像機(水平方向為 4.8 毫米)。物體到鏡頭前部的距離為 12”(305 毫米)。視野或物體的尺寸為2.5”(64 毫米)。換算系數(shù)為 1” = 25.4 毫米(經(jīng)過圓整)。
FL = 4.8 毫米 x 305 毫米 / 64 毫米
FL = 1464 毫米 / 64 毫米
FL = 按 23 毫米鏡頭的要求
FL = 0.19” x 12” / 2.5”
FL = 2.28” / 2.5”
FL = 0.912” x 25.4 毫米/inch
FL = 按 23 毫米鏡頭的要求
注:勿將工作距離與物體到像的距離混淆。工作距離是從工業(yè)鏡頭前部到被觀察物體之間的距離。而物體到像的距離是 CCD 傳感器到物體之間的距離。計算要求的工業(yè)鏡頭焦距時,必須使用工作距離
高速相機
按照不同標準可分為:標準分辨率數(shù)字相機和模擬相機等 。要根據(jù)不同的實際應用場合選不同的相機和高分辨率相機:
按成像色彩劃分,可分為彩色相機和黑白相機;
按分辨率劃分,像素數(shù)在38萬以下的為普通型,像素數(shù)在38萬以上的高分辨率型;
按光敏面尺寸大小劃分,可分為1/4、1/3、1/2、1英寸相機;
按掃描方式劃分,可分為行掃描相機(線陣相機)和面掃描相機(面陣相機)兩種方式;(面掃描相機又可分為隔行掃描相機和逐行掃描相機);
按同步方式劃分,可分為普通相機(內(nèi)同步)和具有外同步功能的相機等。
圖像采集卡
圖像采集卡只是完整的機器視覺系統(tǒng)的一個部件,但是 它扮演一個非常重要的角色。圖像采集卡直接決定了攝像頭的接口:黑白、彩色、模擬、數(shù)字等等。
比較典型的是PCI或AGP兼容的捕獲卡,可以將圖像迅速地傳送到計算機存儲器進行處理。有些采集卡有內(nèi)置的多路開關。例如,可以連接8個不同的攝像機,然后告訴采集卡采用那一個相機抓拍到的信息。有些采集卡有內(nèi)置的數(shù)字輸入以觸發(fā)采集卡進行捕捉,當采集卡抓拍圖像時數(shù)字輸出口就觸發(fā)閘門。
視覺處理器
視覺處理器集采集卡與處理器于一體。以往計算機速度較慢時,采用視覺處理器加快視覺處理任務。采集卡傳輸圖像到存儲器,進而計算分析。當前主流配置的PLC,且配置較高,視覺處理器已經(jīng)幾乎退出市場。
應用案例
在布匹的生產(chǎn)過程中,像布匹質量檢測這種有高度重復性和智能性的工作只能靠人工檢測來完成,在現(xiàn)代化流水線后面常常可看到很多的檢測工人來執(zhí)行這道工序,給企業(yè)增加巨大的人工成本和管理成本的同時,卻仍然不能保證100 %的檢驗合格率(即“零缺陷”)。對布匹質量的檢測是重復性勞動,容易出錯且效率低。
流水線進行自動化的改造,使布匹生產(chǎn)流水線變成快速、實時、準確、高效的流水線。在流水線上,所有布匹的顏色、及數(shù)量都要進行自動確認(以下簡稱“布匹檢測”)。采用機器視覺的自動識別技術完成以前由人工來完成的工作。在大批量的布匹檢測中,用人工檢查產(chǎn)品質量效率低且精度不高,用機器視覺檢測方法可以大大提高生產(chǎn)效率和生產(chǎn)的自動化程度。
特征提取辨識
一般布匹檢測(自動識別)先利用高清晰度、高速攝像鏡頭拍攝標準圖像,在此基礎上設定一定標準;然后拍攝被檢測的圖像,再將兩者進行對比。但是在布匹質量檢測工程中要復雜一些:
1. 圖像的內(nèi)容不是單一的圖像,每塊被測區(qū)域存在的雜質的數(shù)量、大小、顏色、位置不一定一致。
2. 雜質的形狀難以事先確定。
3. 由于布匹快速運動對光線產(chǎn)生反射,圖像中可能會存在大量的噪聲。
4. 在流水線上,對布匹進行檢測,有實時性的要求。
由于上述原因,圖像識別處理時應采取相應的算法,提取雜質的特征,進行模式識別,實現(xiàn)智能分析。
Color檢測
一般而言,從彩色CCD相機中獲取的圖像都是RGB圖像。也就是說每一個像素都由紅(R)綠(G)藍(B)三個成分組成,來表示RGB色彩空間中的一個點。問題在于這些色差不同于人眼的感覺。即使很小的噪聲也會改變顏色空間中的位置。所以無論我們?nèi)搜鄹杏X有多么的近似,在顏色空間中也不盡相同?;谏鲜鲈?,我們需要將RGB像素轉換成為另一種顏色空間CIELAB。目的就是使我們?nèi)搜鄣母杏X盡可能的與顏色空間中的色差相近。
Blob檢測
根據(jù)上面得到的處理圖像,根據(jù)需求,在純色背景下檢測雜質色斑,并且要計算出色斑的面積,以確定是否在檢測范圍之內(nèi)。因此圖像處理軟件要具有分離目標,檢測目標,并且計算出其面積的功能。
Blob分析(Blob Analysis)是對圖像中相同像素的連通域進行分析,該連通域稱為Blob。經(jīng)二值化(Binary Thresholding)處理后的圖像中色斑可認為是blob。Blob分析工具可以從背景中分離出目標,并可計算出目標的數(shù)量、位置、形狀、方向和大小,還可以提供相關斑點間的拓撲結構。在處理過程中不是采用單個的像素逐一分析,而是對圖形的行進行操作。圖像的每一行都用游程長度編碼(RLE)來表示相鄰的目標范圍。這種算法與基于象素的算法相比,大大提高處理速度。
結果處理和控制
應用程序把返回的結果存入數(shù)據(jù)庫或用戶指定的位置,并根據(jù)結果控制機械部分做相應的運動。
根據(jù)識別的結果,存入數(shù)據(jù)庫進行信息管理。以后可以隨時對信息進行檢索查詢,管理者可以獲知某段時間內(nèi)流水線的忙閑,為下一步的工作作出安排;可以獲知內(nèi)布匹的質量情況等等。
應用現(xiàn)狀
在國外,機器視覺的應用普及主要體現(xiàn)在半導體及電子行業(yè),其中大概40%-50%都集中在半導體行業(yè)。具體如PCB印刷電路:各類生產(chǎn)印刷電路板組裝技術、設備;單、雙面、多層線路板,覆銅板及所需的材料及輔料;輔助設施以及耗材、油墨、藥水藥劑、配件;電子封裝技術與設備;絲網(wǎng)印刷設備及絲網(wǎng)周邊材料等。SMT表面貼裝:SMT工藝與設備、焊接設備、測試儀器、返修設備及各種輔助工具及配件、SMT材料、貼片劑、膠粘劑、焊劑、焊料及防氧化油、焊膏、清洗劑等;再流焊機、波峰焊機及自動化生產(chǎn)線設備。電子生產(chǎn)加工設備:電子元件制造設備、半導體及集成電路制造設備、元器件成型設備、電子工模具。機器視覺系統(tǒng)還在質量檢測的各個方面已經(jīng)得到了廣泛的應用,并且其產(chǎn)品在應用中占據(jù)著舉足輕重的地位。除此之外,機器視覺還用于其他各個領域。
而在中國,視覺技術的應用開始于90年代,因為行業(yè)本身就屬于新興的領域,再加之機器視覺產(chǎn)品技術的普及不夠,導致以上各行業(yè)的應用幾乎空白。目前國內(nèi)機器視覺大多為國外品牌。國內(nèi)大多機器視覺公司基本上是靠代理國外各種機器視覺品牌起家,隨著機器視覺的不斷應用,公司規(guī)模慢慢做大,技術上已經(jīng)逐漸成熟。
隨著經(jīng)濟水平的提高,3D機器視覺也開始進入人們的視野。3D機器視覺大多用于水果和蔬菜、木材、化妝品、烘焙食品、電子組件和醫(yī)藥產(chǎn)品的評級。它可以提高合格產(chǎn)品的生產(chǎn)能力,在生產(chǎn)過程的早期就報廢劣質產(chǎn)品,從而減少了浪費節(jié)約成本。這種功能非常適合用于高度、形狀、數(shù)量甚至色彩等產(chǎn)品屬性的成像。
在行業(yè)應用方面,主要有制藥、包裝、電子、汽車制造、半導體、紡織、煙草、交通、物流等行業(yè),用機器視覺技術取代人工,可以提供生產(chǎn)效率和產(chǎn)品質量。例如在物流行業(yè),可以使用機器視覺技術進行快遞的分揀分類,不會出現(xiàn)大多快遞公司人工進行分揀,減少物品的損壞率,可以提高分揀效率,減少人工勞動。




