

【導(dǎo)讀】卓老師,我有一個(gè)信號與系統(tǒng)的問題想請教。按照時(shí)域采樣定理,采樣頻率≥2倍的信號頻率,才能得到信號全部信息。
而以智能車中的編碼器測速為例。我們知道測速周期在可接受范圍內(nèi)越小越利于控速,比如2ms。但2ms采樣一次速度,究竟能不能得到速度信號的全部信息我們卻不得而知,歸根結(jié)底是因?yàn)椴恢浪俣刃盘柕念l率是多少。
那么智能車速度信號的頻率要如何得知呢?
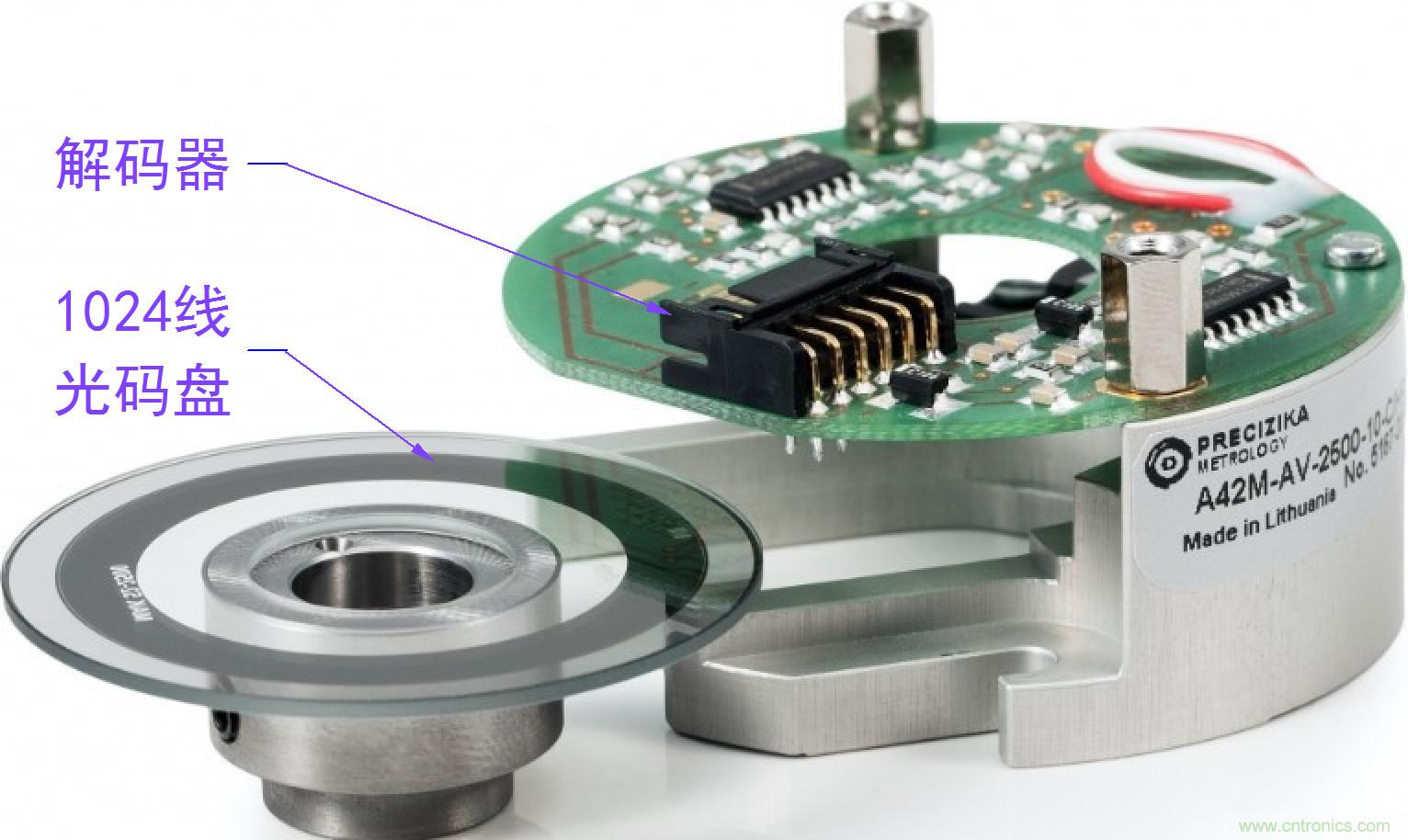
速度光電編碼盤
(回復(fù))提問中的問題包括有三個(gè)子問題:
(1)根據(jù)采樣定理,如何采集速度信號?
(2)使用光電碼盤測量速度信號主要誤差來源是什么?
(3)根據(jù)車模速度控制需要究竟需要按照什么周期采集速度信號?
同學(xué)們學(xué)習(xí)信號采樣定理,最容易犯的錯(cuò)誤就是機(jī)械的照搬定理的結(jié)論,卻沒有注意到定理的使用條件。
信號采樣定理的應(yīng)用條件有兩個(gè):一是信號是一個(gè)頻帶受限信號,即信號有一個(gè)最高頻率;二是除了知道信號頻譜的最高頻率之外,不再知道其它信號的額外信息了。在此條件下,信號的奈奎斯特頻率,即信號的采樣頻率就是信號的最高頻率的兩倍。
如果額外還知道信號的其它條件,比如信號是一個(gè)窄帶信號,除了最高頻率之外,還有最低頻率;此時(shí)就可以使用低得多頻率完成信號的采樣。這一點(diǎn)可以參照鄭君里教授《信號與系統(tǒng)》第三章的最后一個(gè)習(xí)題。
舉一個(gè)極端的例子,如果已知信號是一個(gè)正弦波,即信號的頻譜是一個(gè)線譜,此時(shí)實(shí)際上只需要任意對信號采樣三個(gè)不同時(shí)間的數(shù)據(jù),在一般意義上便可以恢復(fù)該信號,此時(shí)成為信號的參數(shù)估計(jì)。
對于車模的速度信號,經(jīng)過光電編碼盤之后,它反映在兩路輸出正交方波信號中,速度信號是該方波信號的頻率參數(shù)。
此時(shí)可以看成速度信號調(diào)制在兩路正交同頻率的方波脈沖信號中,是調(diào)頻調(diào)制。因此,接受到的光電編碼信號是速度信號的調(diào)制信號。
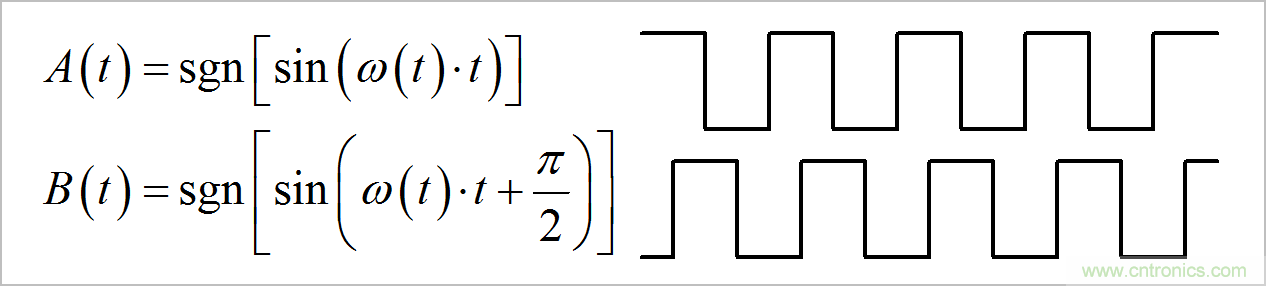
接收到的光電編碼盤信號是速度的調(diào)制信號
所以光電編碼信號的頻譜并不是速度信號的頻譜,而是速度的頻譜被調(diào)制后進(jìn)行了頻譜搬移。如果對速度信號進(jìn)行采樣,則需要對原來信號進(jìn)行解調(diào)之后才能夠獲得速度信號。
如何從光電脈沖信號解調(diào)出速度信號在第二個(gè)小問題進(jìn)行回答。在此之前,還是需要討論普通車模的速度信號的頻譜范圍如何確定?
信號的頻譜范圍取決于信號的交流分量的范圍。如果車模的速度是保持在恒速運(yùn)行,不論這個(gè)速度多大,對應(yīng)的頻譜范圍都是0。
那么如何估計(jì)車模速度的交變分量呢?這一點(diǎn)可以使用車模從速度為零加速到最高速度的時(shí)間,或者從最高速度減速到0 的時(shí)間來衡量。這個(gè)時(shí)間的倒數(shù)與速度的頻帶寬度成正比。
比如車模使用0.2秒從靜止加速到最高速度并保持勻速運(yùn)行,對于這樣一個(gè)斜邊速度信號,它的頻譜本身是無窮大的,但可以認(rèn)為其主要頻譜能量集中在5Hz(0.2秒的倒數(shù))以內(nèi)。對于速度信號的采樣可以使用5Hz的兩倍以上的頻率完成采樣,即10Hz以上的采樣頻率。當(dāng)然,為了留出一定的余量,則需要使用20H以上的頻率進(jìn)行采樣。
具體采樣周期需要根據(jù)第二個(gè)問題-速度測量誤差來源和第三個(gè)問題車模速度離散控制周期綜合確定。
第二個(gè)問題是速度測量誤差來源。由于常見到的速度編碼器是將速度信號調(diào)制在兩路正交脈沖信號上。
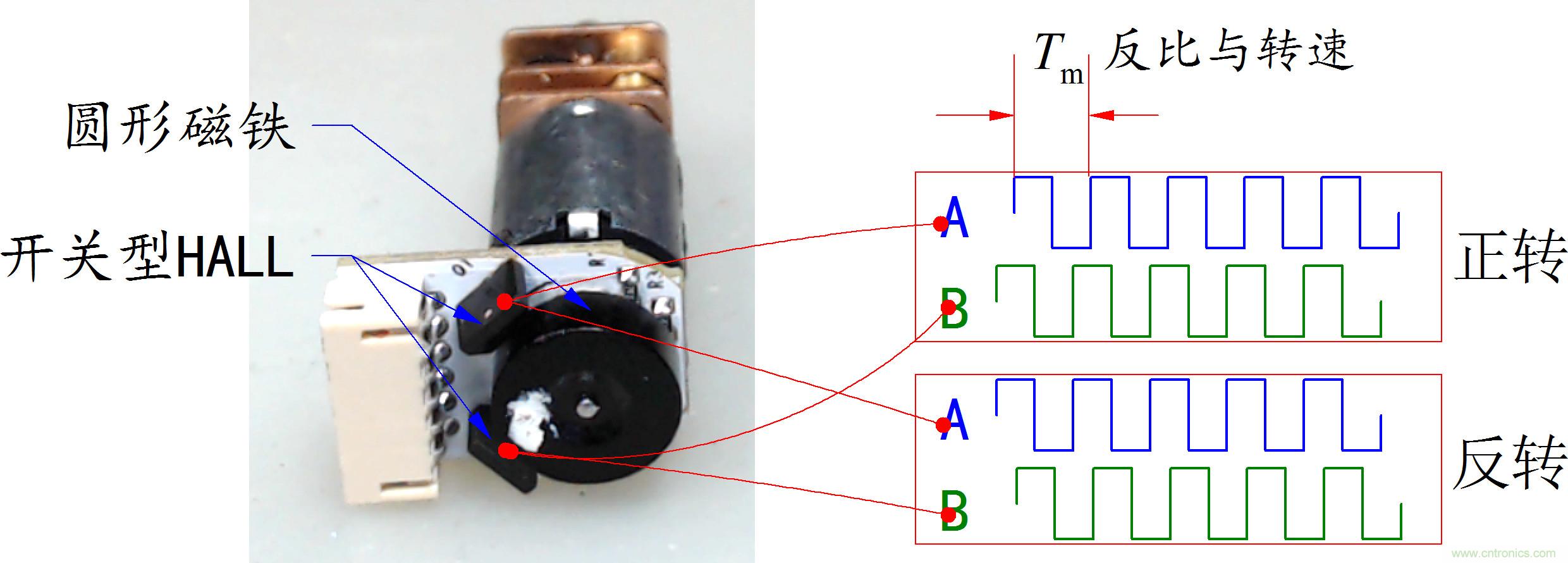
一款實(shí)際應(yīng)用的Hall傳感器測量速度
通??梢圆捎妹}沖數(shù)量測量方法、脈沖周期測量方法、以及它們的組合方法。測量的誤差與總測量時(shí)間T成反比,即測量周期越長,所獲得的頻率越準(zhǔn)確。
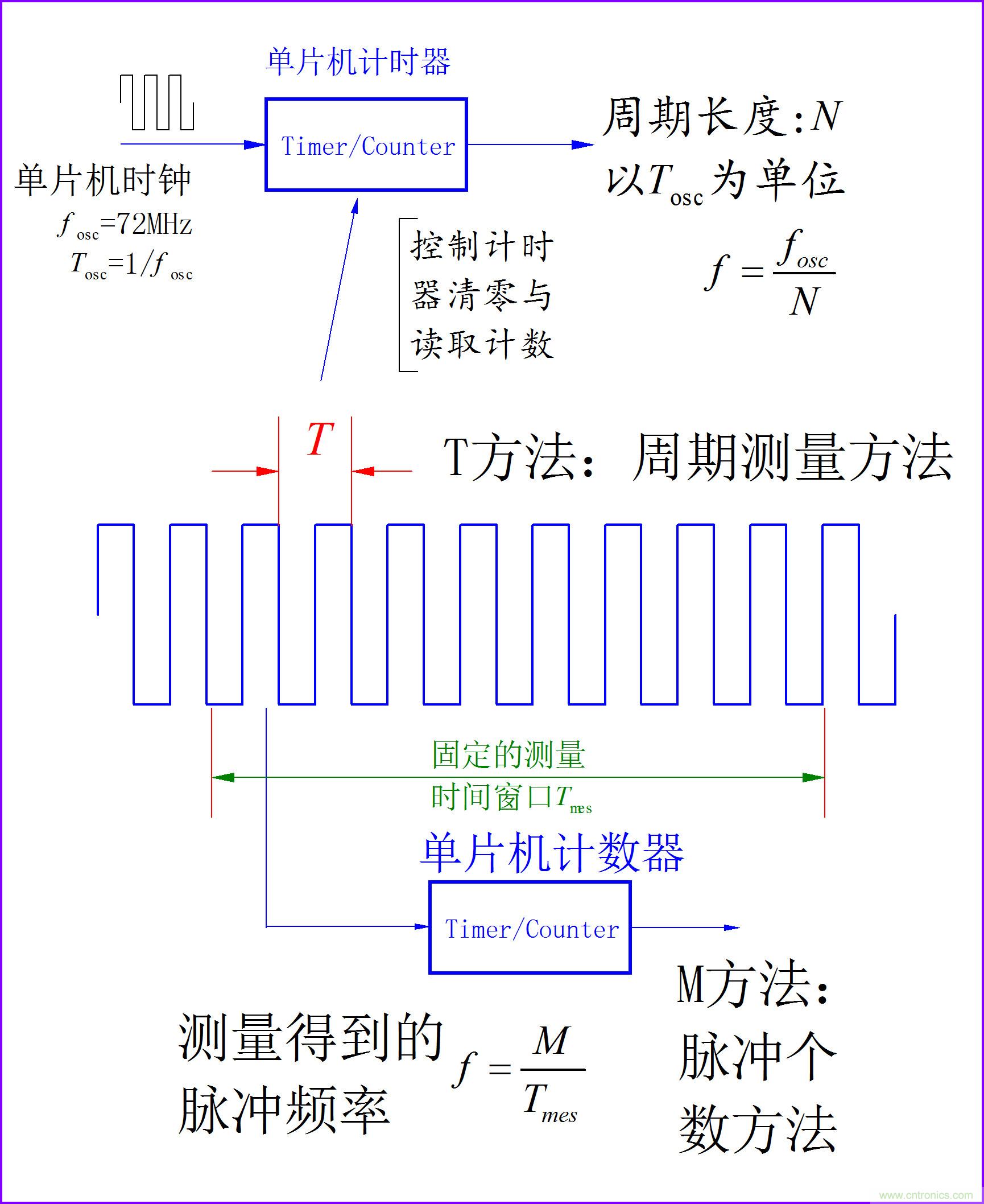
對于信號的頻率估計(jì)所產(chǎn)生的不確定性與信號的持續(xù)時(shí)間T呈現(xiàn)反比關(guān)系。這就是著名的信息測不準(zhǔn)原理。相關(guān)的討論可以參見推文《傅里葉變換與不確定性》中的敘述。
因此,如果想獲得更加精確的速度信息,則需要更長的測量周期,則對應(yīng)的測量速度的頻率就需要越低。最后在結(jié)合控制速度的精確度來粗略估計(jì)對速度的測量大體精度。
最后一個(gè)問題就是關(guān)于車模速度控制周期。車模的速度調(diào)節(jié)是由單片機(jī)通過軟件來實(shí)現(xiàn)的,這是一個(gè)離散時(shí)間控制系統(tǒng)。其中一個(gè)重要的參數(shù),就是離散時(shí)間系統(tǒng)的控制周期的選擇。
離散時(shí)間控制系統(tǒng)的周期在選擇上只要比起控制對象的頻帶寬度對應(yīng)的時(shí)間常數(shù)小一個(gè)數(shù)量級,便可以達(dá)到很好的控制效果了。
當(dāng)確定下速度控制周期之后,對于速度采集的周期(頻率)也就相繼確定下來了,即速度控制周期就等于速度采樣周期。
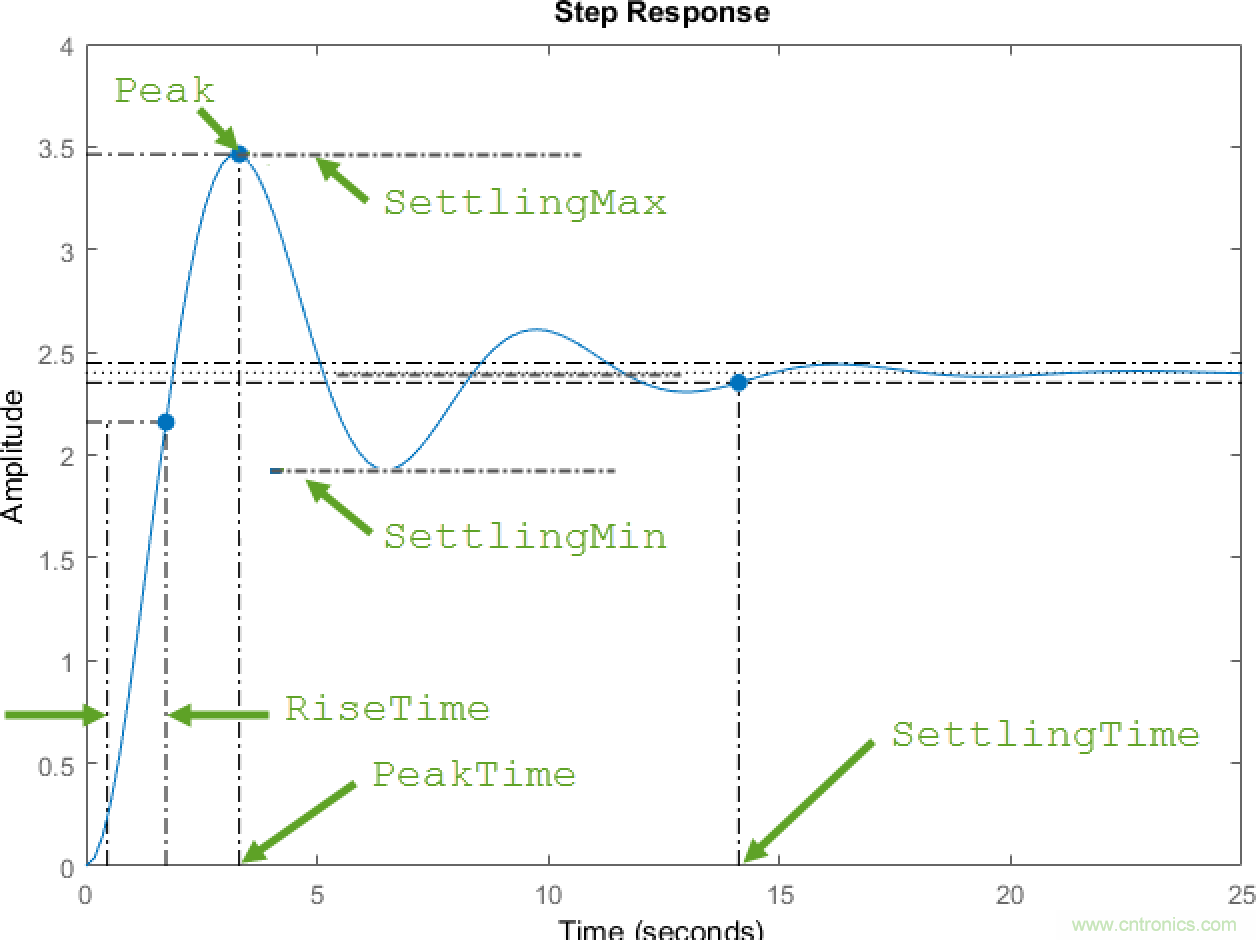
需要根據(jù)控制效果來確定被控對象的控制周期。對于控制效果,往往需要根據(jù)控制結(jié)果的性能來衡量,它們包括控制量的過沖比率、上升時(shí)間、穩(wěn)定時(shí)間以及穩(wěn)態(tài)精度等等。這可以從控制對象的單位階躍響應(yīng)曲線來定義。
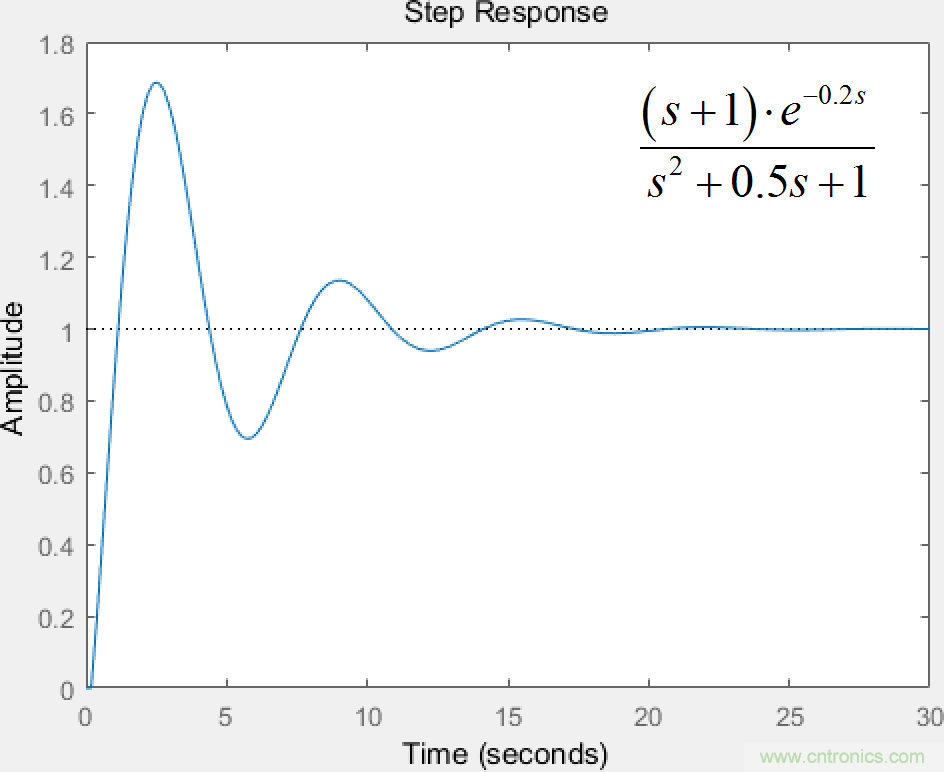
下面是選擇了一個(gè)帶有0.2秒延遲的二階系統(tǒng),它的單位沖擊響應(yīng)如下圖所示:
為了提高該系統(tǒng)的性能,即減少系統(tǒng)過沖,同時(shí)提高系統(tǒng)的跟蹤速度,可以對該系統(tǒng)引入負(fù)反饋控制。
下面是引入比例負(fù)反饋控制的效果。比例控制參數(shù)從0增加到5.

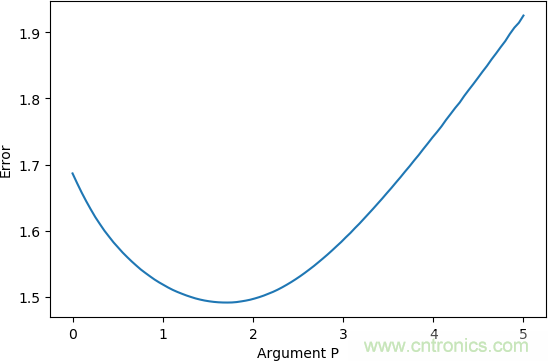
下圖給出了在不同的反饋比例因子,反饋系統(tǒng)的過程比率??梢钥吹剑诜答伇壤禂?shù)為1.75左右時(shí),系統(tǒng)過沖最小,大約在50%的過沖左右。
如果希望進(jìn)一步減少系統(tǒng)的過沖,可以再引入微分控制項(xiàng)。下圖給出了反饋比例系數(shù)為1.75,微分反饋控制系數(shù)從0增加到1的過程中,系統(tǒng)的單位沖擊響應(yīng)曲線。系統(tǒng)的過沖從50%降低到20%左右。

下圖繪制出在不同的微分系數(shù)下,系統(tǒng)的過沖變化曲線。在微分系數(shù)為0.75左右,系統(tǒng)過沖達(dá)到最小。
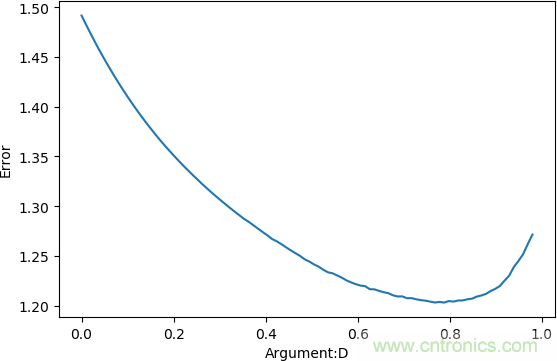
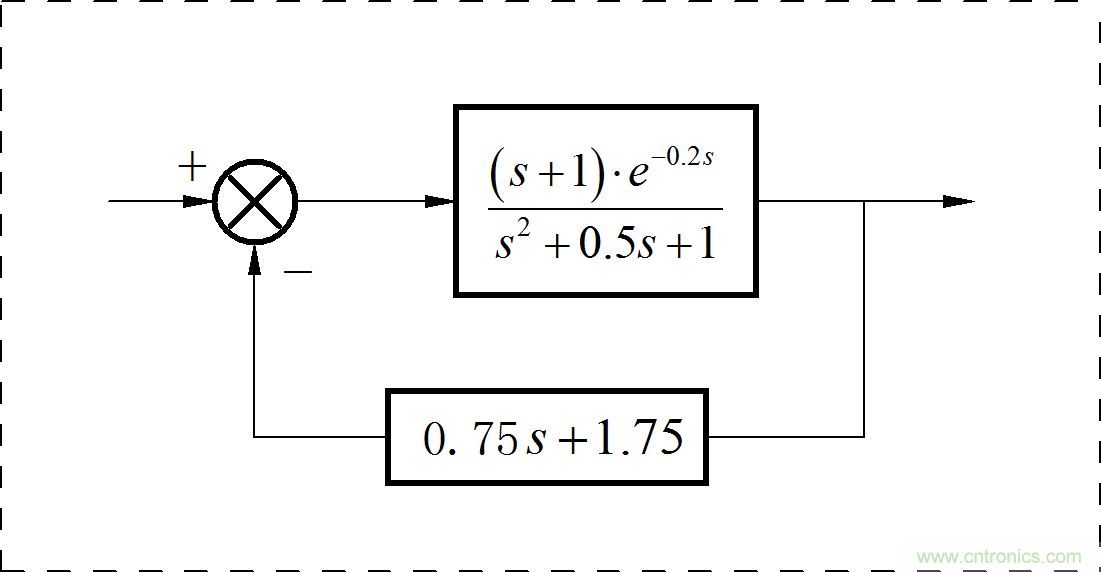
根據(jù)前面兩次實(shí)驗(yàn),可以大體確定下系統(tǒng)反饋控制的最優(yōu)參數(shù),比例系數(shù)為1.75,微分系數(shù)為0.75左右。
所形成的反饋控制如下圖所示:
使用MATLAB的bode命令繪制出此時(shí)系統(tǒng)的頻率特性:
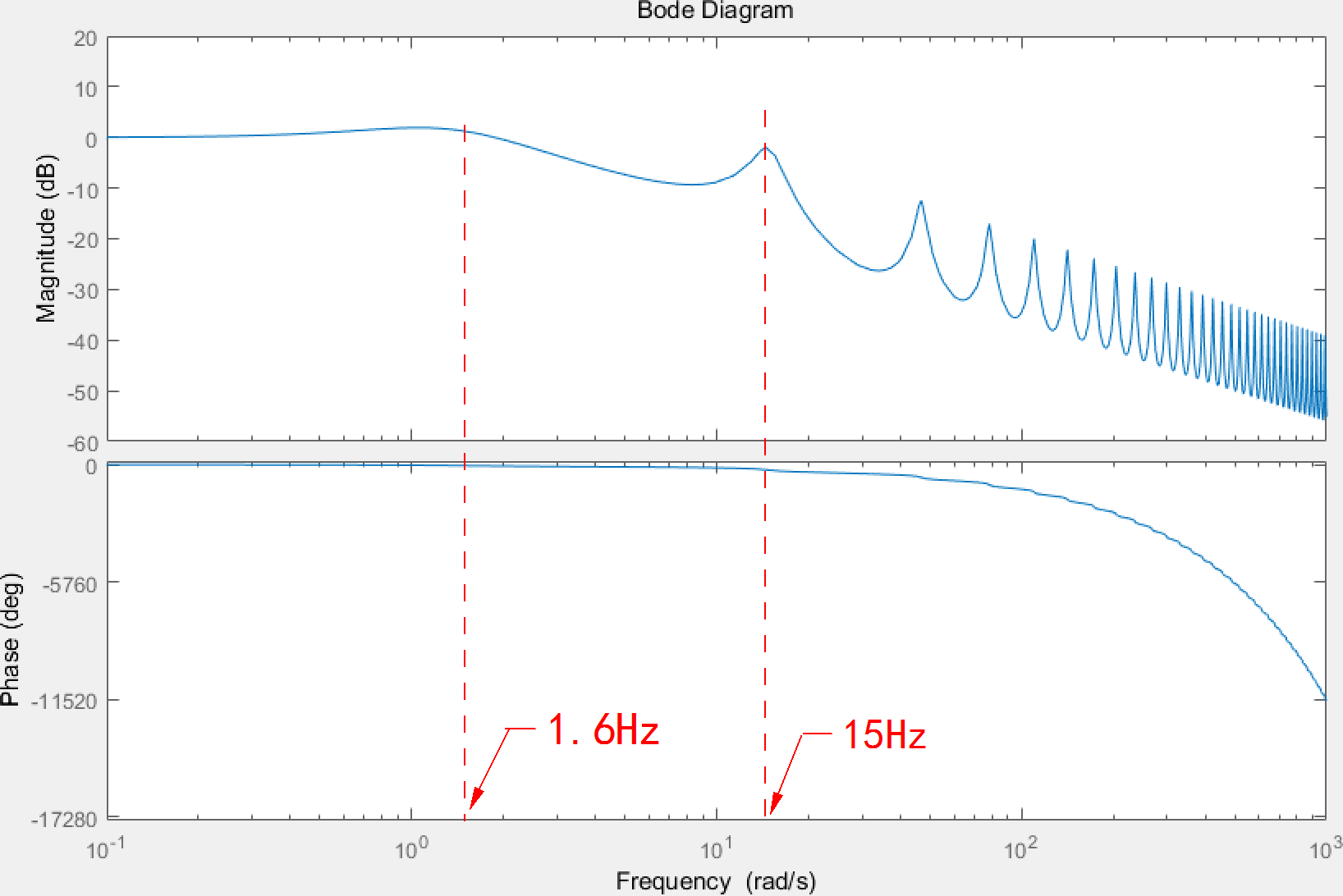
從上圖可以看出,該系統(tǒng)是一個(gè)低通系統(tǒng)。但由于延遲的存在,系統(tǒng)具有多個(gè)諧振峰值。第一個(gè)截止頻率在1.6Hz左右,第一個(gè)諧振頻率在15Hz左右。
對于該系統(tǒng)如果采用單片機(jī)軟件控制,則需要確定控制周期??刂浦芷谂c控制效果之間有什么關(guān)系呢?
下圖通過實(shí)驗(yàn),對原來的連續(xù)控制系統(tǒng)進(jìn)行離散化,取控制周期0.01s變化到0.75秒,觀察系統(tǒng)的單位沖激響應(yīng)的變化。

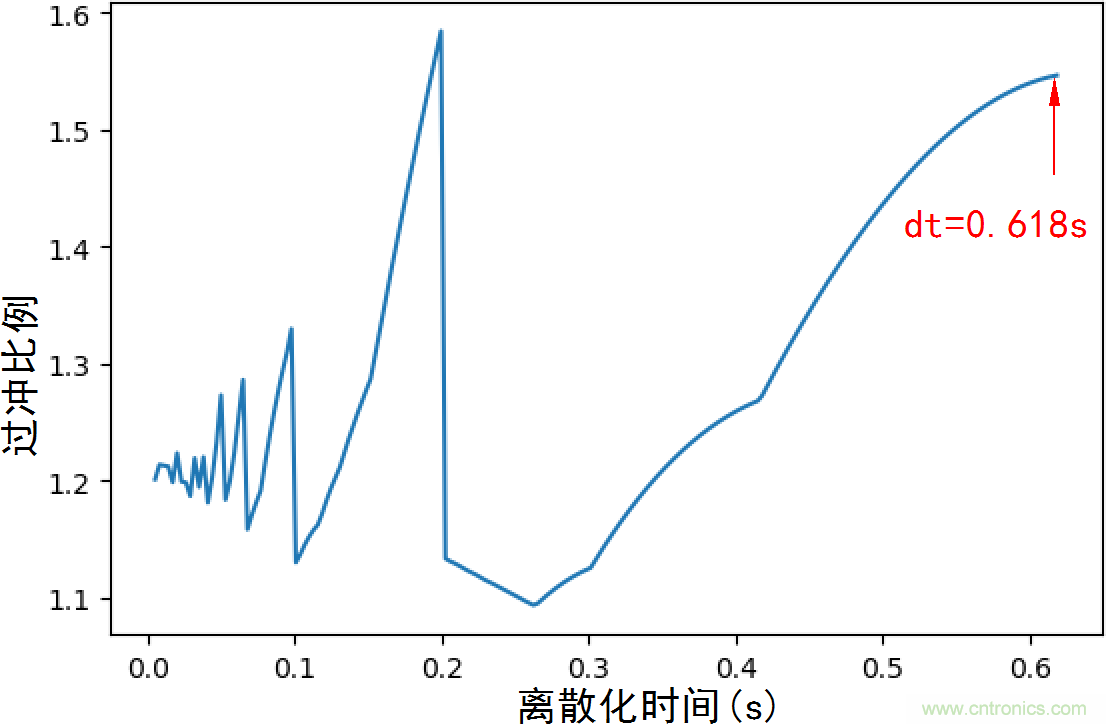
下圖給出了在不同的控制周期下,系統(tǒng)的單位沖擊響應(yīng)的過沖比率。從圖中可以看出,系統(tǒng)過沖量與控制周期之間并不是一個(gè)簡單的曲線關(guān)系,而是隨著控制周期增加呈現(xiàn)多次波動情況。
對于一個(gè)特定的對象,并不是控制周期越小越好,總是存在著一些最優(yōu)的控制周期。
對于該系統(tǒng),當(dāng)控制周期超過0.618秒的時(shí)候,反饋系統(tǒng)就不再穩(wěn)定,呈現(xiàn)發(fā)散狀態(tài)。
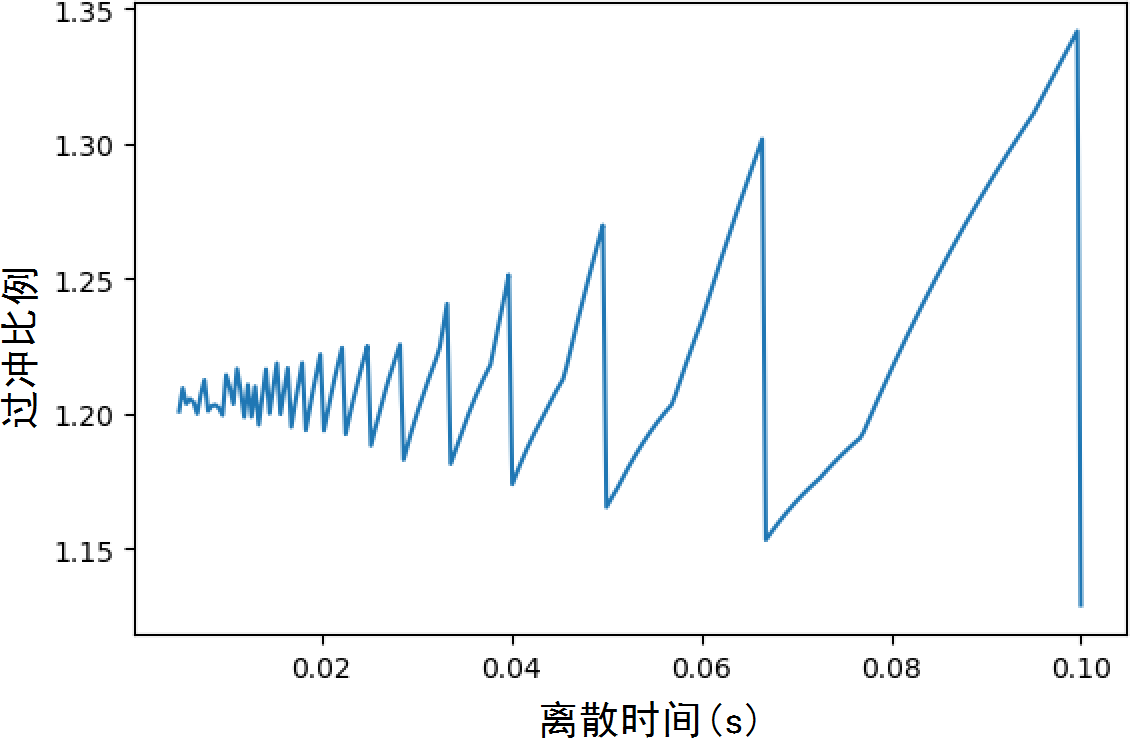
從上面的實(shí)驗(yàn)可以看出,對于控制周期小于0.1秒的時(shí)候,系統(tǒng)是穩(wěn)定的,而且過沖誤差控制在1.35之內(nèi)。下面對于控制周期在0.01至0.1秒之間再進(jìn)行實(shí)驗(yàn),觀察在不同控制周期下的控制效果。
下面曲線繪制出在控制周期從0.01秒到0.1秒變化時(shí),系統(tǒng)的單位沖擊響應(yīng)的過沖誤差曲線。該曲線呈現(xiàn)規(guī)律的波動。
因此,從整體上來看,對于該系統(tǒng),控制周期只要小于0.1秒,系統(tǒng)過沖就不是很大了??刂浦芷趶?0毫秒至40毫秒之間控制性能差別不大了。
最后對于提問的回復(fù)進(jìn)行小結(jié):對于速度信號的測量,它的測量頻率不是按照光電編碼信號的最高頻率來確定的,而是按照其中速度信號的頻率來確定采樣信號的。速度的頻率范圍可以從車模加速時(shí)間或者停止時(shí)間的倒數(shù)來近似確定。
最終的速度采樣周期則需要跟控制軟件周期保持一致。而該周期的確定則是根據(jù)控制性能(過沖量、過渡時(shí)間、穩(wěn)定精度等)來權(quán)衡。
實(shí)踐中,在控制性能能夠滿足要求的情況下,不要一味減小控制周期。這不僅對提高控制性能無益,同時(shí)由于對速度采樣的周期減少,而帶來額外的測量誤差。這測量噪聲在控制回路中會引起更大的控制噪聲。

公眾號留言
留言1:卓老師,針對現(xiàn)在公布的初步規(guī)則我有幾點(diǎn)疑問和建議,想和您交流一下:1.規(guī)則規(guī)定的十字路口超車標(biāo)志,按您的回復(fù)來說并不是所有路口都存在。那如果在不允許抄近路的地方抄了,是否會罰時(shí)?罰時(shí)多久?
2.規(guī)則規(guī)定的車庫元素,其邊緣是全部路肩鋪蓋還是只貼上膠帶還是間隔鋪設(shè)?如果在停車時(shí)撞上了車庫邊緣或者超出其邊緣是否犯規(guī)?如果算犯規(guī)又怎么判罰?

3.按照比賽要求,雙車基本是一定會安裝交接裝置的。這些裝置安裝后車模的長寬高究竟如何計(jì)算?是按照初始狀態(tài)計(jì)算還是按照交接過程中運(yùn)行的最大范圍計(jì)算?
4.初步規(guī)則中并沒有明確車模交接棒的位置。那么這個(gè)位置比賽中究竟是選手自己選還是賽道直接指定?如果指定的話是指定一個(gè)位置還是一片區(qū)域?
對于交接棒的位置老師我有個(gè)建議:可否在賽道設(shè)計(jì)時(shí)就指定一塊區(qū)域交接,然后在這塊區(qū)域上的某個(gè)位置再設(shè)置一個(gè)不帶起跑線的車庫。會車時(shí)要求后車從車庫駛出接球,前車傳球完后駛?cè)朐撥噹?,其他動作不變。這樣就解決了位置的問題,而且校內(nèi)調(diào)試時(shí)多出的這個(gè)車庫并不會影響其他組別同學(xué)調(diào)試。
老師這就是我的疑問和建議,希望老師能夠給予解答,謝謝老師!最后插一句:老師別太熬夜了,注意身體,您這推文時(shí)間太讓人擔(dān)心了
回復(fù):謝謝你通過提問規(guī)則所提出疑問可以幫助我們進(jìn)一步完善規(guī)則。1)如果在沒有標(biāo)示的十字路口車模沒有直接前行,則比賽失?。?)對于車庫邊緣不一定鋪設(shè)路肩,只要車模外輪廓在車庫內(nèi)即算停車成功;否則加罰一定的時(shí)間;3)對于雙車交接接力棒的裝置應(yīng)該計(jì)算在車模總長度內(nèi);該長度應(yīng)該在比賽前、后都不超過要求,這樣判罰較為簡便;4)車模交接區(qū)應(yīng)該在比賽前同一指定,在完成交接過程在前后一個(gè)一米的區(qū)域便于判斷。你所提出的中間再設(shè)置一個(gè)停車庫的建議非常好。值得吸收在正式規(guī)則中。
留言2:老師,這個(gè)燈如果按照規(guī)則進(jìn)行設(shè)定的話。那他的光線就太不均勻了(我們用的是以往的信標(biāo)燈控制電路,電路面積比較?。?。所以我想問一下老師,今年的比賽信標(biāo)燈電路會不會改成面積更大,但更扁的電路?

回復(fù):為了和之前相互能夠兼容,今年的信標(biāo)燈電路不會再增大了。
留言3:卓大大,現(xiàn)在再給您留言可能有點(diǎn)晚了,但是還是想提一些建議。就是不知室內(nèi)能否保留純電磁組給節(jié)能。大大可能不知道,對于節(jié)能來說硬件的糾錯(cuò)周期是很長的,光是把平衡調(diào)出來就要改好幾版車。因?yàn)槲覀儾荒芟袢喗M一樣加配重條來調(diào)機(jī)械零點(diǎn),就只能做一版車測一測中心,然后改一版試試(因?yàn)槲覀兊能囈M可能輕)。
所以留給軟件真正上賽道調(diào)試的時(shí)間其實(shí)不多,像我們學(xué)校去年的節(jié)能組西部賽前只有一個(gè)星期的上賽道調(diào)試時(shí)間。本身調(diào)平衡已經(jīng)不易(主要在于硬件方面想要做到最優(yōu)),如果再加上調(diào)攝像頭,那就有點(diǎn)太極限了。

我們組三個(gè)人雖然都是節(jié)能的萌新,但本身都有一年的競賽基礎(chǔ),我相信大部分敢選節(jié)能的組別應(yīng)該都和我們一樣,但是這項(xiàng)任務(wù)我們做起來也是相當(dāng)頭疼,想到將來的極限操作,還是請大大能夠手下留情。
本文轉(zhuǎn)載自 TsinghuaJoking.
推薦閱讀:




