
【導讀】所謂電源轉(zhuǎn)壓是將輸入電壓通過轉(zhuǎn)壓電路實現(xiàn)升/降壓功能以供其他模塊使用,智能車制作中,輸入電池電壓為7.2V,其他模塊所需電壓如下:最小系統(tǒng)板/OLED/鷹眼攝像頭3.3V、運放供電±5V、舵機供電6V、驅(qū)動電路12V、CCD/編碼器5V。下面就轉(zhuǎn)壓電路做一些相關介紹。
一.電源轉(zhuǎn)壓模塊
所謂電源轉(zhuǎn)壓是將輸入電壓通過轉(zhuǎn)壓電路實現(xiàn)升/降壓功能以供其他模塊使用,智能車制作中,輸入電池電壓為7.2V,其他模塊所需電壓如下:最小系統(tǒng)板/OLED/鷹眼攝像頭3.3V、運放供電±5V、舵機供電6V、驅(qū)動電路12V、CCD/編碼器5V。下面就轉(zhuǎn)壓電路做一些相關介紹。
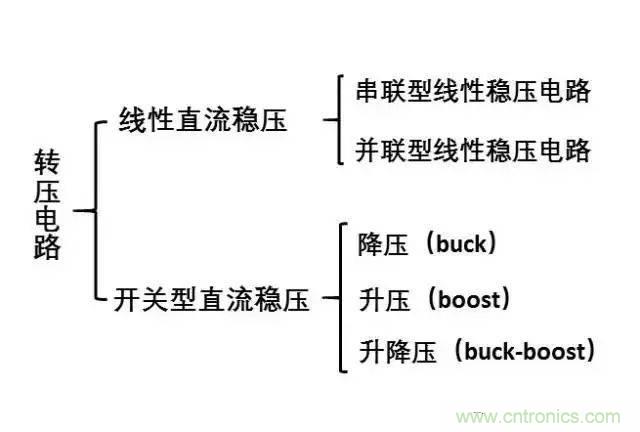
穩(wěn)壓電路主要分為以下種類:
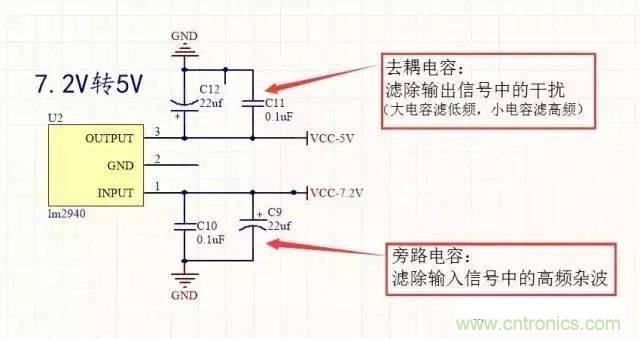
1、LM2940轉(zhuǎn)5V:
LM2940屬串聯(lián)型線性穩(wěn)壓電路(只用于降壓),此類電路結構簡單、穩(wěn)定性高、但功耗大、體積大、濾波效率低,須有較大的輸入和輸出濾波電容。
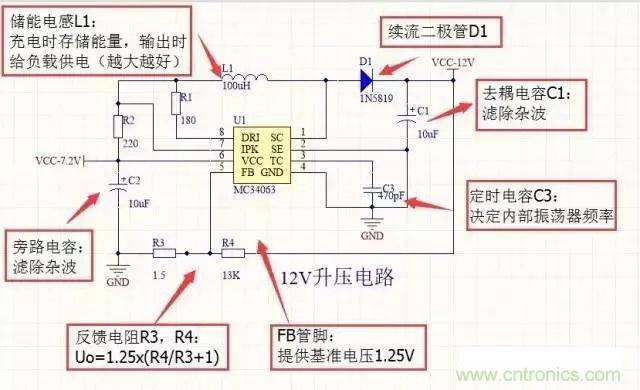
2、MC34063轉(zhuǎn)12V:
MC34063屬于開關型直流穩(wěn)壓芯片(可用于升/降壓),此類電路功耗小、效率高、體積小、重量輕、穩(wěn)壓范圍寬,但其電路結構較復雜、故障率較高。其工作原理是,升壓時其芯片內(nèi)部通過開關管不斷導通(其頻率與定時電容有關),儲能電感與電容短時間內(nèi)不斷充放電對負載提供能量(電感可以選的大一點)以輸出連續(xù)的直流電壓,另Uo=1.25*(1+R4/R3)(參見手冊公式)。
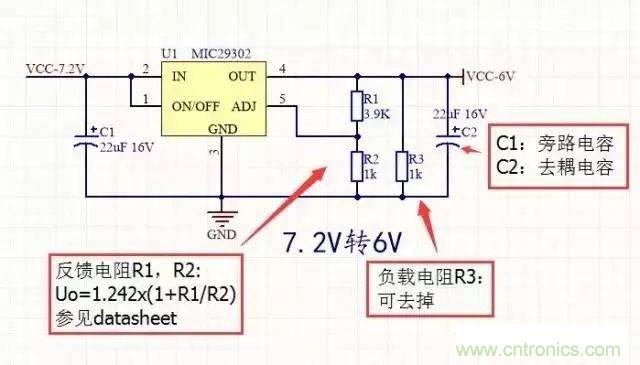
3、 MIC29302轉(zhuǎn)6V:
MIC29302是一種線性可調(diào)穩(wěn)壓器,使用方法與34063電路相仿,可供大電流負載使用,其電壓輸出公式為Uo=1.242*(1+R1/R2)。本例中輸出6V給舵機供電。
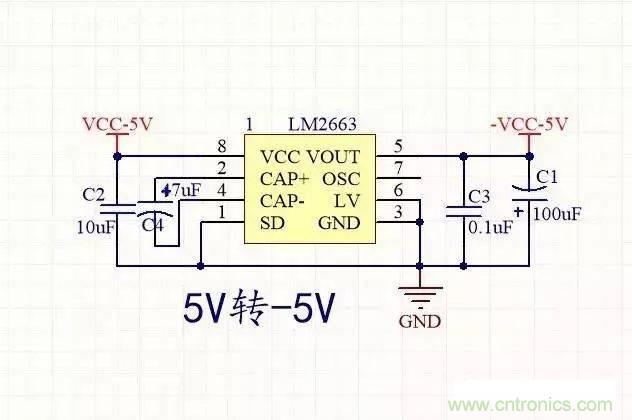
4、 LM2663轉(zhuǎn)-5V:
LM2663可作為一個簡單的負電壓轉(zhuǎn)換器,該電壓逆變器電路只使用兩個外部電容器。
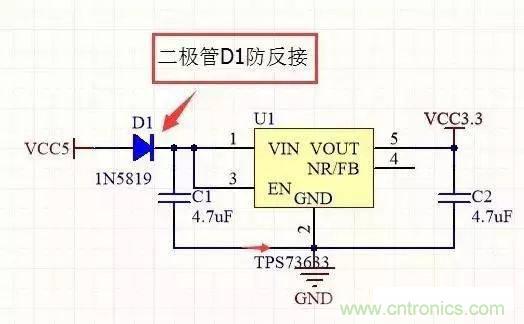
注:應盡量避免由于人工操作失誤等原因造成的電路反接,可在電路中添加防反接設計
1、利用二極管的單向?qū)щ娦裕?/div>
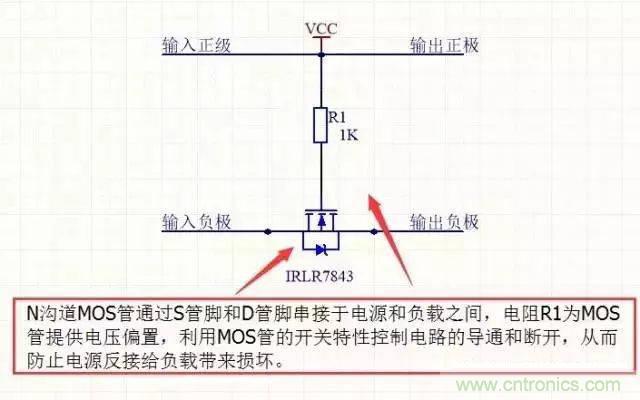

2、MOS管型防反接保護電路
NMOS管接在電源的負極,柵極高電平導通。
PMOS管接在電源的正極,柵極低電平導通。(NMOS管的導通電阻比PMOS的小,最好選NMOS)
3、 各類防反接接口
二.電機驅(qū)動電路
首先,單片機可以輸出直流信號,但是它的驅(qū)動能力也是有限的,所以單片機一般做驅(qū)動信號,驅(qū)動大的功率管如Mos管(LR7843),來產(chǎn)生大電流從而驅(qū)動電機,且占空比大小可以通過驅(qū)動芯片控制加在電機上的平均電壓達到轉(zhuǎn)速調(diào)節(jié)的目的。
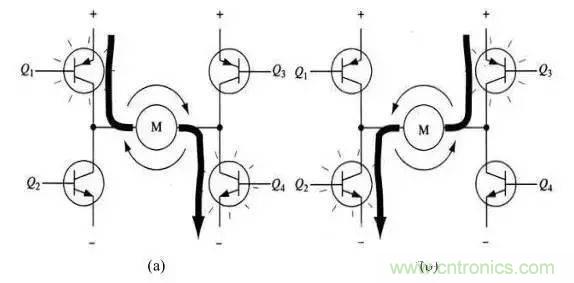
電機驅(qū)動主要采用N溝道MOSFET構建H橋驅(qū)動電路,H 橋是一個典型的直流電機控制電路,因為它的電路形狀酷似字母 H,故得名曰“H 橋”。4個開關組成 H 的 4 條垂直腿,而電機就是H中的橫杠。要使電機運轉(zhuǎn),必須使對角線上的一對開關導通,通過不同的電流方向來控制電機正反轉(zhuǎn),其連通電路如圖所示。
H橋驅(qū)動原理
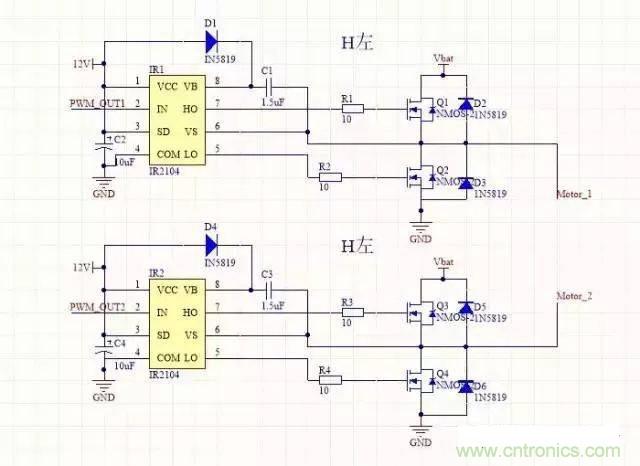
實際驅(qū)動電路中通常要用硬件電路方便地控制開關,電機驅(qū)動板主要采用兩種驅(qū)動芯片,一種是全橋驅(qū)動HIP4082,一種是半橋驅(qū)動IR2104,半橋電路是兩個MOS管組成的振蕩,全橋電路是四個MOS管組成的振蕩。其中,IR2104型半橋驅(qū)動芯片可以驅(qū)動高端和低端兩個N溝道MOSFET,能提供較大的柵極驅(qū)動電流,并具有硬件死區(qū)、硬件防同臂導通等功能。使用兩片IR2104型半橋驅(qū)動芯片可以組成完整的直流電機H橋式驅(qū)動電路,而且IR2104價格低廉,功能完善,輸出功率相對HIP4082較低,此方案采用較多。
另外,由于驅(qū)動電路可能會產(chǎn)生較大的回灌電流,為防止對單片機產(chǎn)生影響,最好用隔離芯片隔離,隔離芯片選取有很多方式,如74lvc245、74hc244、PS2801等,這些芯片常做控制總線驅(qū)動器,作用是提高驅(qū)動能力,滿足一定條件后,輸出與輸入相同,可進行數(shù)據(jù)單向傳輸,即單片機信號可以到驅(qū)動芯片,反過來不行。




